| Google překladač: |

|

|
Exkluzivní partner sekce



Aktuality
- Rockwell a NVIDIA se podílejí na vývoji autonomních mobilních robotů
- FalconEditor pro digitální dvojčata a simulace
- Siemens Process Simulate pro nýtování držáků okapů
- Představení veletrhu Formnext Chicago 2025
- OSTROJ využívá k prototypování virtuální realitu
- Seminář Advanced Engineering TECH DAY 2024
- ABB Robotika spouští celosvětovou soutěž pro startupy
- Nové možnosti kovového 3D tisku pro český průmysl
CAD na www.SystemOnLine.cz
 3D tisk kovů je nová výzva a trend, ale především výrazná konkurenční výhoda
3D tisk kovů je nová výzva a trend, ale především výrazná konkurenční výhoda Novinka od Sony pro tvůrce 3D obsahu
Novinka od Sony pro tvůrce 3D obsahu 3D tisk bude nedílnou součástí budoucnosti obuvnictví
3D tisk bude nedílnou součástí budoucnosti obuvnictví Jak se bude vyvíjet 3D tisk v roce 2024
Jak se bude vyvíjet 3D tisk v roce 2024T+T Technika a trh
 Anemometry – co jsou, k čemu jsou určeny a jak jsou konstruovány
Anemometry – co jsou, k čemu jsou určeny a jak jsou konstruovány Skupina Mewa přebírá specialistu na čisté prostory Mikroclean
Skupina Mewa přebírá specialistu na čisté prostory Mikroclean Umělá inteligence a kyberbezbečnost
Umělá inteligence a kyberbezbečnost Jak CNC řezací plotr KIMLA našel uplatnění ve výrobě kabinv DFK CAB
Jak CNC řezací plotr KIMLA našel uplatnění ve výrobě kabinv DFK CAB RAVEO nově spolupracuje s Reggiana Riduttori
RAVEO nově spolupracuje s Reggiana RiduttoriStreamTech.tv
Robot, nebo had? |
| Pondělí, 21 Prosinec 2009 15:41 | |
|
V přírodě nenajdeme analogii k pohybu pomocí kola a ani pomocí pásů. V současné době je již několik aplikací, kde jsou použity přírodní analogie pohybů. Ve většině případů si však zatím člověk vystačil s klasickými dosud využívanými přístupy. Šance pro využití biologických vzorů jsou především v případech, kdy možnosti využití klasických prostředků z nějakých důvodů končí. Tento článek se zabývá konstrukcí modelu robota inspirovaného pohybem hadů. Model byl vyvinut v rámci diplomové práce [1] a využívá se jako didaktická pomůcka při výuce na Strojnické fakultě Technické univerzity v Košicích. Úvod do pohybu plazůHadi již v minulosti na sebe poutali pozornost svými zvláštními pohyby. Podrobněji se zkoumáním pohybů hadů zabývali v Hirose & Yoneda Lab [2] a zjistili, že had realizuje mnoho druhů pohybů uzpůsobených k podmínkám okolí. Tyto pohyby jsou obecně klasifikovány do čtyř základních režimů:
1. Harmonikový pohyb, 2. klikatý pohyb, 3. boční ohýbání, 4. přímočarý pohyb Kinematické uspořádání článkovaného robotaRobot (obr. 2, 3) sestává z osmi článků, mezi nimiž je sedm rovinných kloubů. Podstata kinematického uspořádání spočívá ve střídání vertikálních a horizontálních pohybů. První a poslední článek, tedy Článek 1 (Hlava) a Článek 8 (Ocas), byly navrženy tak, aby konaly vertikální pohyb kvůli předpokládanému způsobu pohybování se vpřed.Tento návrh byl inspirován jednoduchým pohybem kinematické dvojice s jedním stupněm volnosti a myšlenkou střídání těchto pohybů.  Obr. 2 Kinematické uspořádání robota  Obr. 3 Pohyb robota Pro předběžné ověření flexibility návrhu robota byl vytvořen papírový model, na kterém byly zkoušeny možnosti lokomoce robota (obr. 4).  Obr. 4 Papírový model robota Obr. 4 Papírový model robotaNávrh hada-robotaKaždý článek disponuje jedním stupněm volnosti vzhledem k sousednímu článku robota. Tyto pohyby jsou generovány akčními členy, tj. polohovými servomechanismy Hitec HS 645MG. Konkrétní žádaná poloha výstupního hřídele servomechanismu je zadávána pomocí šířky impulzu v rozmezí 1,0 až 2,0 ms.Každý servomotor disponuje kromě samotného motoru, převodovky a řízení i potenciometrem pro snímání úhlu natočení výstupního hřídele. Pro získání informace o aktuální poloze úhlu natočení jednotlivých kloubů bylo nutné snímat jejich úhly natočení. Ideálním řešením je využití interního snímače úhlu natočení – potenciometru, který je obsažen již v servomechanismu pro vlastní ovládací elektroniku servomechanismu. Protože nepotřebujeme instalovat externí snímač polohy úhlu natočení jednotlivých kloubů, dojde ke značnému zjednodušení konstrukce robota a snížení jeho hmotnosti. Pro získání informace z interního snímače polohy je třeba z něj vyvést informaci pomocí kabelu připojeného k běžci tohoto potenciometru. Experimenty ukázaly, že na běžci potenciometru se spojitě mění elektrické napětí v závislosti na úhlu natočení kloubu. Toto napětí je ale závislé také na napájecím napětí servomechanismu (při napájení robota z akumulátorů se mění jejich elektrické napětí v důsledku jejich vybíjení), a proto je třeba jej stabilizovat na konstantní hodnotu. Touto úpravou jsme získali signálovou linku s informacemi o úhlu natočení jednotlivých kloubů bez instalace dodatečných snímačů. Při prvních experimentech se servomechanismy se ukázalo, že tyto servomechanismy se vzájemně vyruší. Projevilo se to chaotickým otáčením všech servomechanismů při buzení jednoho servomechanismu. Původní signálové vodiče dodané výrobcem proto bylo třeba vyměnit za stíněné vodiče. Po této úpravě byly tyto nedostatky odstraněny. Konstrukční uspořádání robotaJeden článek robota (obr. 5) byl celkově složený z 13 kusů dílců. Nejdůležitějším požadavkem na článek byla souměrnost jeho stran z důvodu symetrie pro dosažení funkčnosti a stability při pohybu robota. Obr.5 Uspořádání článku robota a ukázka max. natočení dvou článků  a hnané rameno a jejich uchycení") Obr. 6 Hnací (se servem) a hnané rameno a jejich uchycení Konstrukční uspořádání hlavy a ocasu (obr. 7) se liší, protože v hlavě bylo třeba umístit plošný spoj řídící jednotky a v ocasu napájecí zdroj – akumulátory.  Obr. 7 Hlava a ocas robota.  Obr. 8 Uspořádání hnacích ramen robota Před samotnou realizací byl vytvořen 3D model pro ověření funkčnosti robota (obr. 9). Realizace robota byla doprovázena řešením několika technologických problémů, jako jsou např. přesnost ohýbání jednotlivých dílů apod. Pro tento účel byl navržen technologický přípravek pro ohýbání plechových dílů. Realizovaný model je na obr. 9.  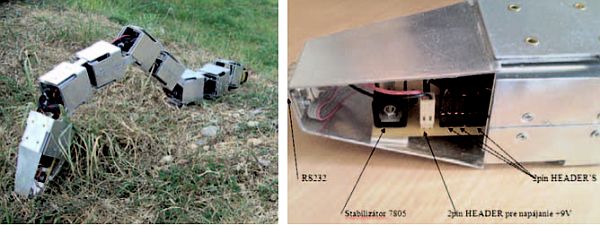 Obr. 9 3D model robota a jeho realizace ZávěrPohyb je pro živé organismy základem přežití, potřebují ho na to, aby si zajistily potravu, aby unikly nepříteli, aby se vyhnuly nebezpečí atd. Způsoby pohybu živých organismů slouží velmi často jako inspirace při návrhu různých zařízení, nevyjímaje z toho ani pohybující se zařízení.Na zrealizování modelu byl experimentálně odzkoušen pohyb na principu pohybující se ( „cestující“) vlny (travelling wave). Při tomto pohybu pohybující se robot vytváří vlnivý pohyb. Co všechno s naším „plazem“ budeme chtít dělat a následně ho to naučíme, ukáže čas. Jedno je jisté, hádek nezapadá prachem a plazí se mezi studenty a učiteli získávaje stále větší a větší zkušenosti. Literatura
Článek byl vypracován v rámci řešení projektů:
Mohlo by vás zajímat:
|
 Za našich dětských dob a možná i nyní mezi dětmi koloval jeden vtip. Ptali se dítěte, čím by chtělo být. A ono, že hadem. A proč? Protože si lehnu a jdu. Představa, že si lehnu a jdu, je sice lákavá, ale opravdu velmi dětská. Za našich dětských let se o takových vleže se pohybujících technických zařízeních pouze snilo. Dnes se staly realitou konstrukce a výuky v oboru Mechatronika na našich vysokých školách. Kolik úsilí je třeba vyvinout a umu použít, aby se dalo lehnout a jít, popisuje následující text.
Za našich dětských dob a možná i nyní mezi dětmi koloval jeden vtip. Ptali se dítěte, čím by chtělo být. A ono, že hadem. A proč? Protože si lehnu a jdu. Představa, že si lehnu a jdu, je sice lákavá, ale opravdu velmi dětská. Za našich dětských let se o takových vleže se pohybujících technických zařízeních pouze snilo. Dnes se staly realitou konstrukce a výuky v oboru Mechatronika na našich vysokých školách. Kolik úsilí je třeba vyvinout a umu použít, aby se dalo lehnout a jít, popisuje následující text. Obr. 1 Základní techniky pohybu hadů v pořadí shora dolů
Obr. 1 Základní techniky pohybu hadů v pořadí shora dolů