| Google překladač: |

|

|
Partneři Projektu CAD





Off-line programování robotů pomocí simulačního programu RobotStudio |
 Výrobní linky automobilek si dnes už ani neumíme představit bez robotů. Neúnavně a přesně provádějí neustále se opakující činnost, ať už při bodovém svařování komponentů karosérie, nanášení lepidla a osazování předních a zadních skel automobilu nebo při mezioperační dopravě na lisovacích linkách. To bylo zmíněno jen pár úkonů, které by byly pro člověka únavné a mnohdy i zdraví škodlivé. Toto je úděl robotů, zbavit člověka namáhavé a nebezpečné práce. Ale i tak je za vším člověk. Výrobní linky automobilek si dnes už ani neumíme představit bez robotů. Neúnavně a přesně provádějí neustále se opakující činnost, ať už při bodovém svařování komponentů karosérie, nanášení lepidla a osazování předních a zadních skel automobilu nebo při mezioperační dopravě na lisovacích linkách. To bylo zmíněno jen pár úkonů, které by byly pro člověka únavné a mnohdy i zdraví škodlivé. Toto je úděl robotů, zbavit člověka namáhavé a nebezpečné práce. Ale i tak je za vším člověk.
Kromě navržení robota je třeba ho i naučit očekávané práci, kterou bude vykonávat. A to se děje s pomocí CA.. systémů, resp. speciálních simulačních programů. Vše se odladí na monitoru počítače a pak se již můžeme s obdivem dívat na souhru našich pomocníků na výrobních a montážních linkách. Robot ve virtuálním prostředíVelké CA.. systémy jsou standardem při 3D návrhu výrobku, představují průmyslově vedoucí nástroje produktivity, které podporují osvědčené postupy při navrhování, zajišťující shodu s průmyslovými a podnikovými normami a směrnicemi. Integrovaná, parametrická 3D CAD/CAM/CAE řešení nám umožňují konstruovat rychleji než dříve a zároveň maximalizovat úsilí v oblasti inovací a kvality pro dosažení co nejlepších užitných vlastností produktů. Programování off-line s využitím technologie virtuálního robota funguje tak, jako bychom měli reálný robot na našem počítači. Programování off-line je nejlepším způsobem, jak maximalizovat návratnost investic robotizovaných linek. Software pro simulaci a off-line programování od ABB – RobotStudio umožňuje programování robota na počítači bez nutnosti zastavení výroby. Rovněž umožňuje dopředu připravit programy robotů, což zvyšuje celkovou produktivitu výroby. RobotStudio poskytuje nástroje ke zvýšení ziskovosti robotizovaného systému tím, že umožňuje vykonávat úkoly, jakými je například školení, programování a optimalizace bez nutnosti zásahu do výrobního procesu. Simulace dráhy efektoru a eliminování kolizíPři návrhu svařovacího přípravku je důležité dosáhnout co nejlepší přístupnost k svařovaným bodům. Pro zjištění této přístupnosti nám slouží simulace dosahu kleští, u nichž umíme zkontrolovat na virtuálních modelech podmínky, které se budou vyskytovat v reálné aplikaci. Pomocí těchto simulací dolaďujeme optimální vlastnosti navrhovaných svařovacích přípravků i trajektorii dráhy robota.
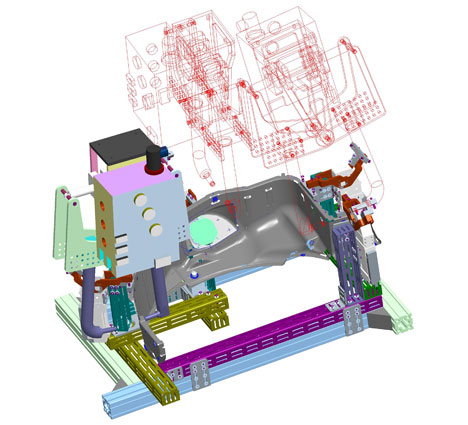
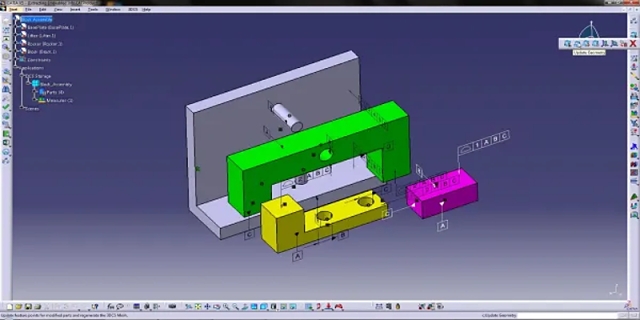
Na obr. 1 je znázorněn svařovací přípravek v 3D aplikaci Pro/Engineer Wildfire, určený pro svařování zadního vnitřního blatníku terénního automobilu. Přípravek je vybaven pneumatickými upínači firmy Tuenkers V50 T01 A10. Obrázek nám znázorňuje přístupnost bodovacích kleští k svařovacím bodům při bodovém svařování tří menších dílců k základnímu dílci blatníku uchyceného ve svařovacím přípravku. V simulačních aplikacích (RobotStudio) je možné zkontrolovat přístupnost svařovacích kleští ke svařovaným dílům, jakož i zamezit kolizním stavům mezi kleštěmi, svařovanými díly a přípravky. Možnost vygenerování kompatibilního řídícího kódu trajektorie dráhy robota a pracovního úkonu, který by byl schopen příslušný robot přijmout, je problematická. Proto je vhodně používat programy schopné generovat potřebná data vhodná pro jednotlivé typy robotů. Simulační programy jsou většinou tvořeny většími výrobci robotů, jako např. RobotStudio firmy ABB, RobCAD firmy Kuka, apod... Jak to u konkurence bývá, vzájemná kompatibilita těchto produktů je problematická, ačkoli v posledním období dochází ke zlepšení této situace.
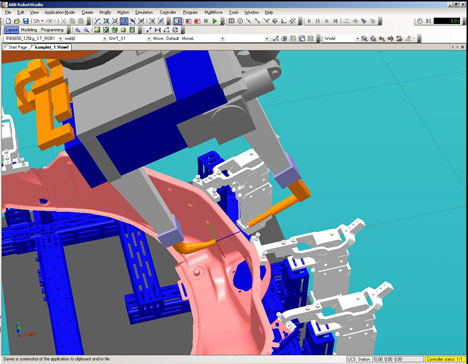
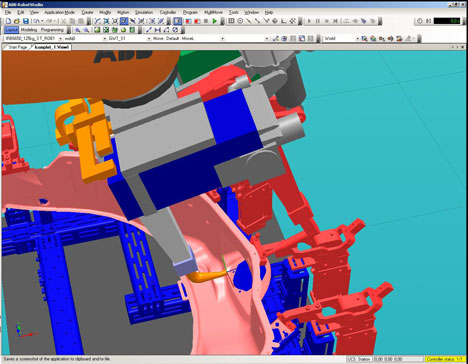
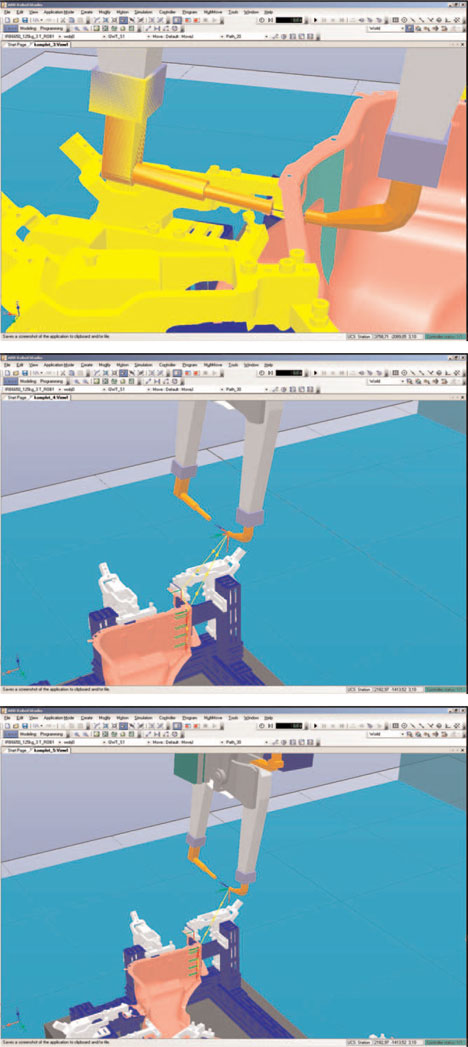
Pro efektivní využití možnosti off-line programování je nutné využívat možnosti simulačních programů. V rámci programu RobotStudio je možné provádět simulace kolizních stavů (obr. 2, 3). Na obrázku 2 jsou zobrazeny svařovací kleště a svařovaná sestava dílců, přičemž kleště se nacházejí v bezpečné vzdálenosti od prvků přípravku, takže nedochází ke kolizi. Obr. 3 zobrazuje kolizní stav, kde kleště narážejí do upínacích prvků přípravku. Kolize je naznačena červenou barvou kolidujících prvků – ramene bodovacích kleští a sestavy upínacích prvků.
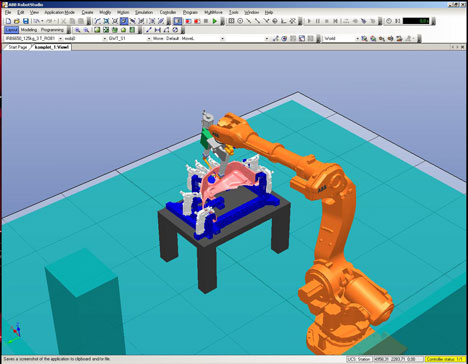
Pomocí simulačního programu RobotStudio můžeme vytvořit program, ze kterého software vygeneruje NC kód. Tento kód je nahrán do řídícího systému robota. Přenos programu je možné provést pomocí přenosných médií u starších robotů nebo pomocí sítě prostřednictvím TCP/IP protokolu. Jednou z výhod off-line programování robotů a současného využití simulačních programů je možnost kontroly každého bodu programu v reálném čase. V případě špatné přístupnosti koncových efektorů – svařovacích kleští, hořáků apod. – je možné přistoupit ke změně programu, přidání nebo odebrání problematických bodů v programu. Je možné zpětně měnit tvar jednotlivých částí přípravku, provést jeho optimalizaci, případně změnit typ svařovacích elektrod nebo změnit trajektorii dráhy efektoru, a to vše v simulačním prostředí nezávislém na reálné výrobě. Laděním programu ve virtuálním prostředí odpadají prostoje linky, čímž se šetří drahocenný výrobní čas. Další výhodou je možnost využití potenciálu robota, jeho celkového pracovního prostoru, možnosti vyhnutí se mrtvým zónám. V případě nutnosti použití dvou a více robotů při svařování ve společném pracovním prostoru je možnost vytvoření programů, které budou vylučovat kolizní stavy dráhy jednotlivých robotů. Je možné přiřadit priority pohybů jednotlivých robotů, jakož i zjistit pozice robotů v jakémkoliv čase pracovního cyklu. Optimalizace manipulačních a pracovních pohybůNejvětší výhodou je možnost neustálé optimalizace manipulačních i pracovních pohybů jednotlivých robotů, což v nemalé míře přispívá ke snížení pracovních časů robotů a tím k souvisejícímu zvyšování produktivity a efektivity jejich práce. Na obr. 6 je analyzována dráha bodovacích kleští před optimalizací, přičemž tento pohyb trvá cca 20 sekund. Stav po optimalizaci je na obr. 7, přičemž optimalizací dojde ke zkrácení potřebného času o 4 sekundy.
ZávěrDnešní doba je charakteristická flexibilitou výrobních linek. Rychlá obměna produktů produkovaných na robotizovaných pracovištích nutí výrobce z hlediska konkurenceschopnosti na trhu k neustálým modifikacím a vývoji nových produktů. Tento cíl není možné splnit bez využití off-line programovacích prostředků, jako jsou virtuální prostředí, vizualizace, analýza kolizí apod. Z tohoto hlediska budoucnost programování robotických buněk spočívá v neustálém zdokonalování a využívání virtuálních metod řízení dráhy a pracovních operací robotů. Svědčí o tom i implementace těchto modulů do prostředí velkých CAD/CAM systémů renomovaných firem. Příspěvek byl vypracován v rámci řešení projektu VEGA 1/0022/10 a VEGA 1/0810/11. Literatura:[1] Hajduk, M., Daneshjo, N., Baláž, V., Semjon, J.: Robotické bunky, TU SjF Košice 2008, 84 s. ISBN 978-553-0034-4
Mohlo by vás zajímat:
|