| Google překladač: |

|

|
Partneři Projektu CAD





Efektivní vývoj řídicí jednotky automobilu |
| Autor článku: Humusoft | |
|
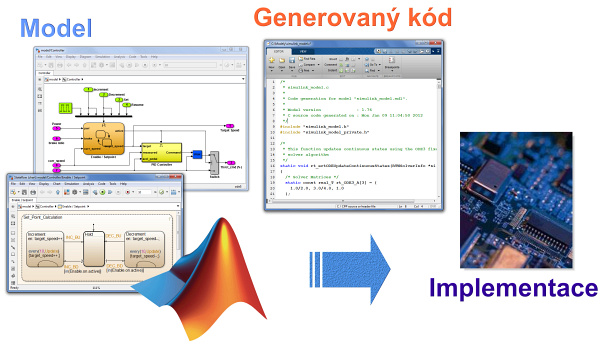
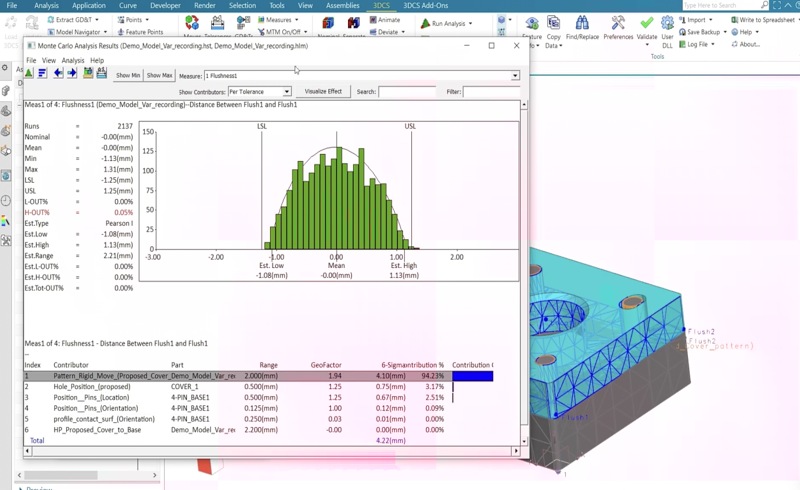
Při vývoji řídicích jednotek automobilů (ECU), stejně jako jiných komplexních systémů se striktními požadavky, je naprosto zásadní odhalit jakékoliv nedostatky v návrhu co nejdříve. Pozdní odhalení chyb může vést k rozsáhlým změnám v celém systému a neúměrnému navýšení nákladů. Problémům je možné předejít, pokud je již v raných etapách vývoje ECU k dispozici přesný simulační model motoru. Modelování a simulaci při vývoji řídicích jednotek využila také společnost Toyota Motor Corporation (obr. 1). Modely umožnily začlenit do výrobního programu testování metodami model-in-the-loop (MIL) a software-in-the-loop (SIL) a přenést tak těžiště verifikace do dřívějších fází návrhu sytému. Společnost Toyota využila k modelování svých spalovacích motorů nástroje MATLAB a Simulink firmy MathWorks. Simulink je grafické prostředí blokových schémat, ve kterém lze modelovat nejrůznější dynamické systémy a simulovat jejich chování. Simulink je platformou pro návrhovou metodu Model-Based Design (obr. 2). Společnost Toyota využila Simulink nejen k modelování motoru, ale v simulačním prostředí byl modelován i celý řídicí algoritmus a simulátor uzavřené smyčky soustavy s řízením. Práce v jednotném prostředí tak vývoj řídicího systému velmi zjednodušila. Zařazení návrhové metody Model-Based Design do vývoje ECU vedlo ke zkrácení vývojového cyklu a minimalizovalo dodatečné opravy. Tím bylo možné uvést nové produkty na trh dříve, než to zvládaly konkurenční společnosti. Počátky projektuSpolečnost Toyota využívala modelování při vývoji ECU již minulosti. Jednalo se však o relativně jednoduché modely, které dovolily testovat jen malou část funkcí řídicí jednotky, bez možnosti zkoušení a optimalizace řídicích algoritmů. K zajištění optimální funkce nového motoru bylo zapotřebí vytvořit takový model, který by pokrýval chování celého pohonu, včetně paliva, spalování a systémů recirkulace spalin (EGR).
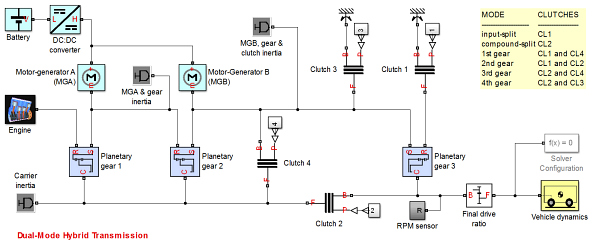
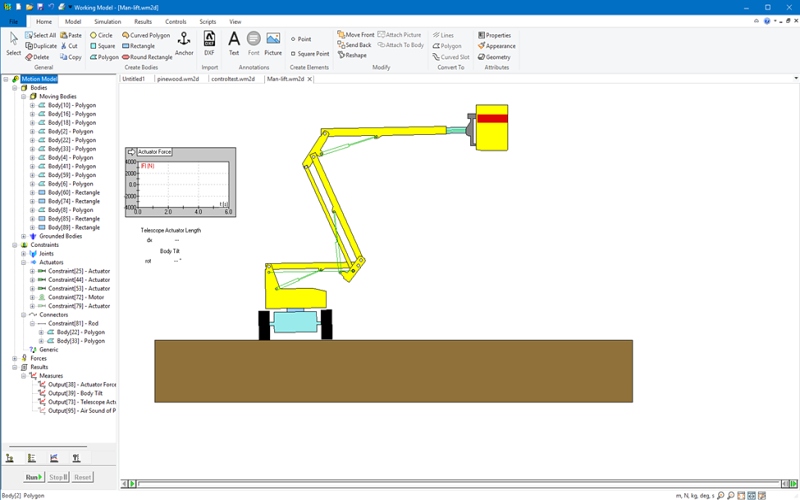
K efektivnímu vývoji ECU bylo zapotřebí zlepšit i pružnost a rozšiřitelnost používaných SIL a MIL technologií. Nezbytná byla podpora simulované komunikace mezi řídicími jednotkami (sběrnice CAN), podpora ladění řídicích algoritmů na úrovni zdrojového kódu za běhu SIL simulace a zajištění správného pořadí obsluhy přerušení (ISR) a časovačů. Od modelu k implementaciSpolečnost Toyota využila nástroje MATLAB a Simulink k vytvoření nového modelu motoru, který čítal několik tisíc rovnic. Model byl vytvořen v nadstavbě Simscape, která umožňuje modelování fyzikálních systémů pomocí bločků reprezentujících jednotlivé prvky reálného světa. Bloky jsou při modelovaní skládány na základě fyzického uspořádání soustavy (obr. 3) a matematické rovnice jsou z nich vytvářeny automaticky. Kromě toho lze definovat vlastní uživatelské prvky pomocí jazyka Simscape language. Vývojový tým společnosti Toyota vytvořil v jazyce Simscape language vlastní knihovny prvků a fyzikální prostředí, které zahrnovalo několik typů plynů, včetně vzduchu, paliva a spalin. Uživatelské prvky reprezentovaly spalovací komoru a cesty proudění plynů (včetně EGR). Kombinací těchto modelů s modely prvků dodávaných s nástrojem Simscape bylo možné modelovat měnič výkonu, automatickou převodovku a další části pohonné soustavy. Následovala tvorba modelu řídicího systému ECU. Kromě dynamických prvků zde byl využit i stavový popis systému modelovaný v nástroji Stateflow. Nový návrh řídicí logiky byl prověřen simulacemi na úrovni modelu (model-in-the-loop) a umožnil tím zohlednit i dynamické chování připojené soustavy. Návrh pokračoval automatickým generováním zdrojového kódu v jazyce C, které nástroje pro Model-Based Design nabízí. Zdrojový kód generovaný z modelů řídicího algoritmu byl kompilován a testován v software-in-the-loop simulacích (SIL). Tím byly prověřeny nízkoúrovňové ovladače, přesná sekvence spouštění ISR a časovačů a další detaily, které není možné prověřit na úrovni modelů. K ladění zdrojového kódu během SIL simulací byla využita spolupráce s nástrojem Microsoft Visual Studio. Breakpointy zadané do zdrojového kódu zastavily simulaci v Simulinku, vývojáři mohli zkontrolovat stav řídicích proměnných a poté v simulaci pokračovat. Pomocí MATLABu byly dále automatizovány simulace určené k optimalizaci parametrů a MATLAB sloužil i pro analýzu dat ze simulací a provedených testů.
ZávěrS využitím model-a-software-in-the-loop simulací byl úspěšně navržen nový řídicí modul, který byl následně integrován s řídicím softwarem. Společnost Toyota v současnosti využívá metodu Model-Based Design ve vývoji řídicích systémů motorů, převodovek i hybridních elektrických systémů. Prověření návrhu v raných etapách vývojeMetoda Model-Based Design a SIL simulace přenesly testování návrhu řídicího systému již do raných etap vývojového cyklu. Simulací bylo například možné prověřit řídicí systém motoru a převodovky s konfigurací sběrnice CAN, což následně značně ulehčilo přechod k testování systému v reálném vozidle. Simulace obtížně testovatelných podmínekVývojáři vytvořili v Simulinku vlastní platformu pro SIL simulaci. Ta umožnila podrobné prozkoumání řídicího systému v řadě pracovních podmínek, které byly obtížně nastavitelné v reálném voze nebo testovacím prototypu. Distributor produktů společnosti MathWorks v České republice a na Slovensku:
Mohlo by vás zajímat:
|
 Vývoj v automobilovém průmyslu kráčí nezadržitelným tempem vpřed a jednotliví výrobci se předhánějí v efektivitě spotřeby paliva, snižování emisí a zlepšování jízdních vlastností svých vozů. S rostoucími požadavky však roste i složitost softwaru řídicích jednotek, které jsou dnes nedílnou součástí všech automobilů. Efektivní řešení návrhu nabízí metoda Model-Based Design postavená na nástrojích MATLAB a Simulink firmy MathWorks.
Vývoj v automobilovém průmyslu kráčí nezadržitelným tempem vpřed a jednotliví výrobci se předhánějí v efektivitě spotřeby paliva, snižování emisí a zlepšování jízdních vlastností svých vozů. S rostoucími požadavky však roste i složitost softwaru řídicích jednotek, které jsou dnes nedílnou součástí všech automobilů. Efektivní řešení návrhu nabízí metoda Model-Based Design postavená na nástrojích MATLAB a Simulink firmy MathWorks.