|
Pátek, 22 Prosinec 2017 09:22 |
|
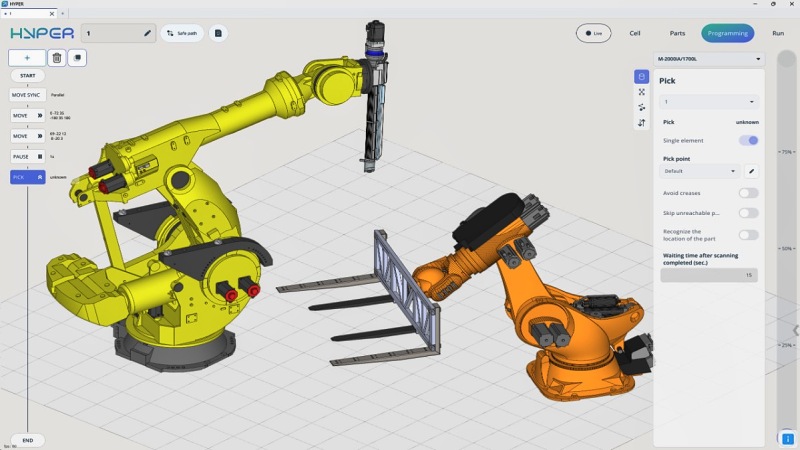
Tags: Android | Aplikace | Comau | PickAPP | Programování | Robot | Tablet ") Aplikace pro Android s názvem PickAPP, nyní ve verzi 1.1, umožňuje provádět operace typu „vyber a umísti“ namísto dosavadních dálkových ovládání robotů z ručního panelu. Aplikace PickAPP je určena pro 8–10palcové tablety s přednastavenými grafickými operacemi, díky nimž může každý využít chytrý telefon pro ovládání pohybů robota a sestavit seznam bodů během procesu, aniž by se musel učit programovací jazyk pro robotiku. Uživatel může robotem pohybovat manuálně, nebo využít rozhraní podobné tomu, jaké se využívá u autíček nebo u dronů. Aplikace pro Android s názvem PickAPP, nyní ve verzi 1.1, umožňuje provádět operace typu „vyber a umísti“ namísto dosavadních dálkových ovládání robotů z ručního panelu. Aplikace PickAPP je určena pro 8–10palcové tablety s přednastavenými grafickými operacemi, díky nimž může každý využít chytrý telefon pro ovládání pohybů robota a sestavit seznam bodů během procesu, aniž by se musel učit programovací jazyk pro robotiku. Uživatel může robotem pohybovat manuálně, nebo využít rozhraní podobné tomu, jaké se využívá u autíček nebo u dronů.
Jednoduše lze přidat i dodatečné konfigurace jako typ pohybu či akce spojené s robotickým chapadlem. Na vývoji aplikace spolupracovalo větší množství uživatelů z různých oblastí průmyslu, než bývá zvykem. Aplikace je určena prozatím pro roboty Rebel-S (SCARA), Racer3 a Racer5 (se zatížením 3 až 5 kilogramů), ale brzy bude implementována do kompletní řady robotů Comau. Aplikace je ke stažení zde. |