| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 05.07. AutoCAD 2013 - základní kurz
- 09.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 13.07. AutoCAD – kurz pro středně pokročilé
- 13.07. Trimble SketchUp – základní kurz
- 15.07. Autodesk Inventor – základní kurz
- 15.07. AutoCAD Electrical – základní kurz
- 17.07. Autodesk Inventor – kurz iLogic
- 20.07. Blender – úvod do 3D
- 20.07. Blender – úvod do 3D
- 21.07. AutoCAD a AutoCAD LT – základní kurz

Aktuality
- ORECA si vybrala Siemens Xcelerator na zdokonalení konstrukce vozů pro motosport
- Stačí vyfotit dům a AI dopočítá střechu – doktorandi FEL ČVUT vítězí ve světové soutěži
- Jak chytré míče sledují každý dotek
- CAD Schroer se zaměřil na startupy
- Pozvánka na CADfórum 2026
- Gravity Sketch vydává aktualizaci rozhraní
- ENGYS uvedl open-source CFD HELYX ve verzi 4.5.1
- BOOTIQ navrhl maskota pro IT oddělení Škoda Auto

Stavíme malého průmyslového robota |
| Autor článku: Petr Fořt | |
| Středa, 03 Leden 2018 00:00 | |
|
Jedním z hlavních požadavků byla minimalizace vstupních nákladů na projekt a jeho maximální variabilita s možností rozšíření tématu do dalších oblastí v budoucích letech. Za pozitivní efekt jsme bezesporu považovali také možnost tvorby individuálních modifikací připraveného řešení s ohledem na dostupnost studentských licencí softwaru, technický a technologický support na naší škole. Efektivní konstrukci průmyslového robota bylo nutné aplikovat nejen v mechanické konstrukci jeho jednotlivých kinematických uzlů, ale také v oblastech servopohonů a řídících jednotek.
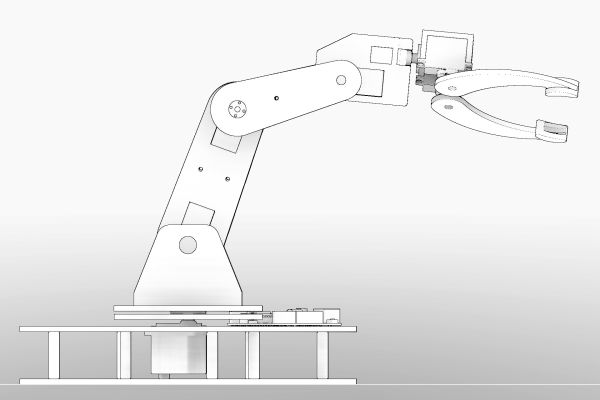
Digitální prototyp v koncepčních studiíchProjekt je průběžně realizován u studentů, kteří již mají jisté zkušenosti s aplikací tvorby digitálních prototypů a s 3D navrhováním v produktové řadě společnosti Autodesk. Záměrně volíme v oblasti 3D modelování průmyslové konstrukční postupy a nástroje, které jsou technické praxi výrazně bližší a poskytují modelu jeho základní atributy. Těmi jsou především rozměrová a geometrická přesnost s vazbou na tvorbu technické dokumentace, výrobu na 3D tiskárnách, CNC strojích nebo laserovém řezacím stroji. Projekt je tak možné „dotáhnout“ do finální podoby daleko jednodušší cestou, než jak je tomu při využití obecných modelovacích softwarových nástrojů. Výraznou výhodou aplikace tvorby digitálních prototypů je také nutnost zpracovat celý výrobek systematicky včetně správy dat a plánování jednotlivých etap realizace projektu.
Základní koncept robota vychází z několika důležitých požadavků, které ovlivňuje především možnost individuálního přizpůsobení tématu a přesná funkčnost celého řešení s možností jejího snadného programového přizpůsobení. Je tak možné na jednom tématu potrénovat celou řadu situací, se kterými se mohou studenti setkat ve své budoucí praxi. Výraznou roli v řešení projektu hraje také jeho časová náročnost, která musí být pravidelně rozložena do minima vyučovacích hodin. Jednotlivé kinematické studie sestavení robota byly postupně ve výuce simulovány v produktech společnosti Autodesk. Konkrétně se jedná především o aplikaci adaptivních simulací náčrtů v aplikaci Autodesk Inventor, kdy je možné nahradit často složitě modelované pohybové uzly jednoduchou soustavou náčrtů a vazeb.
Jednoduše vyrobitelná variantní konstrukceOd počátku myšlenky realizovat tento projekt v rámci výuky na škole bylo nutné sledovat strategii jednoduché modifikovatelné výroby sestavy robota. Od prvních záměrů aplikovat v rozsáhlé míře technologii 3D tisku bylo upuštěno vzhledem k časově a finančně náročné výrobě rozměrnějších dílů robota. V konstrukci jsme se inspirovali v oblasti stavby malých letadel a aplikace profilových řezů byla částečně upravena s ohledem na využití aplikace Autodesk 123 Make. Spojení drobných dílů vyrobených na 3D tiskárně a rozměrnějších profilů vyráběných na CNC stroji, případně pomocí laserového řezání, navíc poskytuje na půdě školy velmi pěkné ukázky nasazení PLM strategií digitální produkce.
Díky jednoduché konstrukci sestavy, kterou je možné realizovat individuálně každým studentem, získáváme možnost dalších variantních řešení. Z průmyslového robota lze tak vytvořit například robotický přepravní systém nebo létající dron. Stačí vyrobit několik modifikovaných součástí a přeprogramovat řídicí systém mikropočítače. Výsledkem je vždy ve finále funkční celek, který je řízen mikropočítačem na základě softwarového vybavení programovaného ve výuce. Metodika realizace projektuProjekt konstrukce průmyslového robota je rozložen v průběhu třetího ročníku studia do několika samostatných částí. Jednotlivé etapy realizace projektu prakticky kopírují strategie běžné v produkci „dospělého“ technického zařízení v průmyslové praxi. Pro zjednodušenou představu uveďme alespoň několik základních bodů:
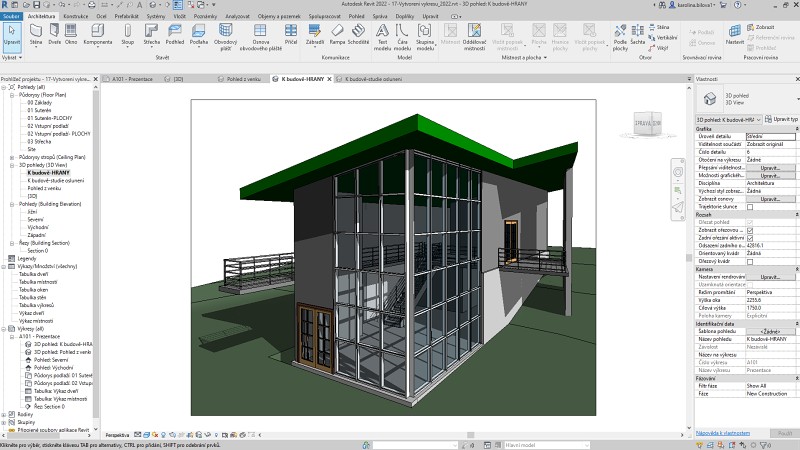
Metodika realizace projektu vychází ze zobecněného postupu řešení podobného úkolu ve výuce. Studenti jej aplikují například v případech samostatněji řešených úloh jako součást ročníkových, případně závěrečných prací. Výraznou výhodou v této oblasti je opora oborově širokého aplikačního vybavení poskytovaného v rámci celosvětového projektu Autodesk Academia. Lze tak plynule přecházet v řešení úlohy napříč jednotlivými technickými obory. Finální sestava robota může být například umístěna do prostředí nově připravené laboratoře v Autodesk Revitu a simulována v prostředí virtuální reality například v Autodesk V-RED Pro nebo cloudovém Autodesk Live.
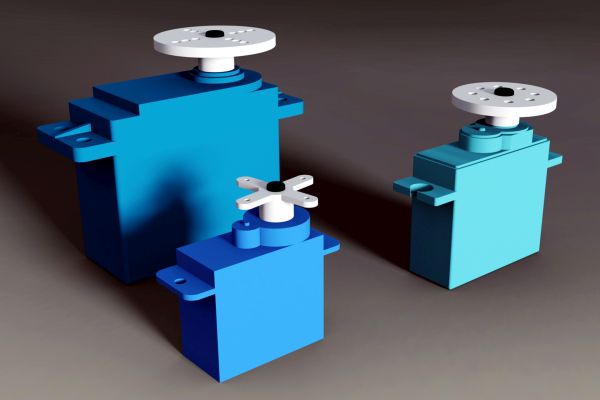
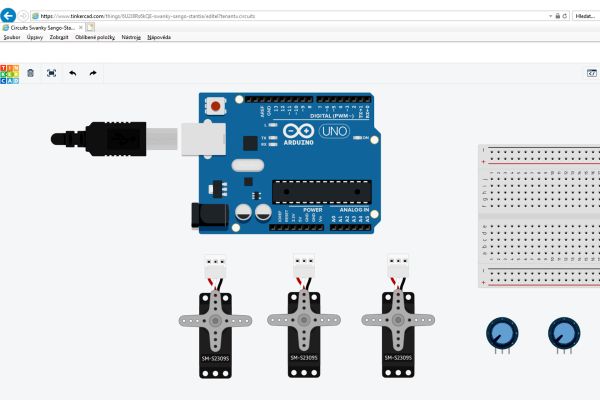
Dostupné řízení s možností simulaceVolba výrobních procesů, potřebného technického a softwarového vybavení s uživatelsky programovatelným mikropočítačem, je citlivě optimalizována s ohledem na vývojové nástroje pro mikropočítače Arduino. Vlastní tvorba aplikací pro řízení robota navazuje na výuku programování. Technologie univerzálních jednodeskových mikropočítačů disponuje velkým potenciálem řešení jak v oblasti přizpůsobení dané technické situaci, tak v oblasti možnosti přímého vývoje řídicí aplikace. Díky dostupnosti tohoto systému je možné nad Arduinem vystavět množství zajímavých úloh, které umožňují nahlédnout doslova až pod pomyslnou pokličku vývoje aplikačního softwaru. Vynikající vlastností Arduina je jeho možnost přímého spojení například se signalizačními nástroji a servopohony bez nutnosti vkládat konstrukčně složitější silové části. Projekt Arduino vznikl v roce 2005 v Itálii s cílem rozvíjet výuku aplikačního programování a vývoje na školách a získává si globálně velkou oblibu také v průmyslové oblasti. Arduino je postaveno na otevřené desce, která je vestavěna do zařízení s možností následného softwarového přizpůsobení. Autodesk reagoval na popularitu projektu ve svých cloudových projektech výraznou podporou Arduina ve vývojovém a simulačním prostřední Autodesk Circuits, který je aktuálně přesunut pod nástroj Autodesk Tinkercad Circuits.
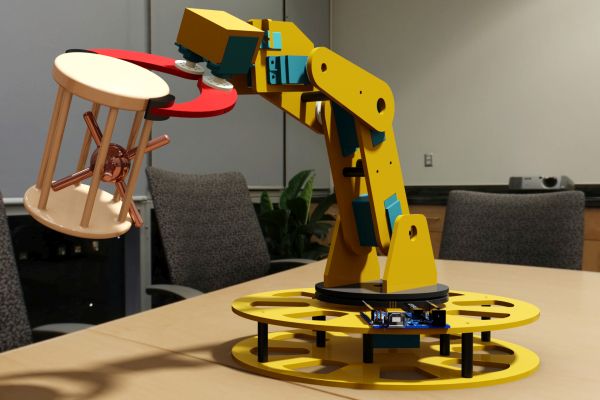
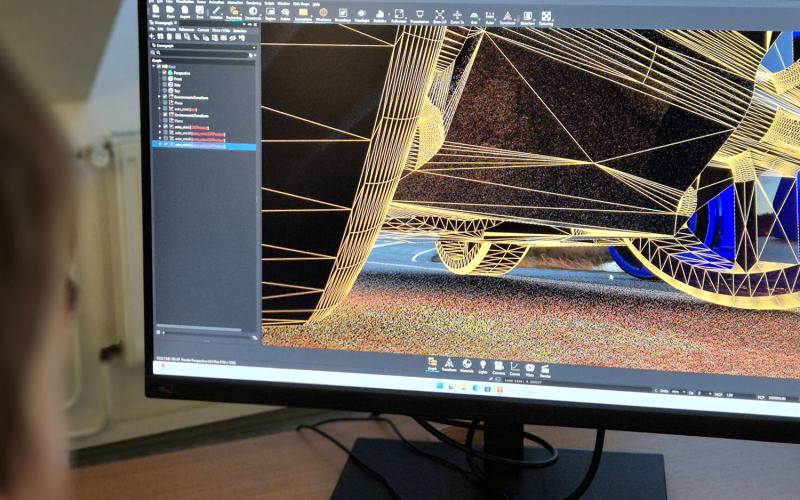
Ve vývoji našeho robota je využito Arduina, které ovládá na svých přímých výstupech jednotlivé pohyby robota pomocí pulzního řízení na signální lince jednotlivých servopohonů. Pohyb jednotlivých serv je možné řídit manuálně pomocí potenciometrů, nebo jej lze automatizovat na základě softwarových modifikací. Otevřenost Arduina dává v realizaci technických projektů celou řadu dalších možností. V řízení je využito serv s digitálním snímáním trajektorie pohybu, která jsou optimalizována na příslušné mechanické zatížení s využitím dynamické simulace v Autodesk Inventoru. Závěrem bychom rádi poděkovali třídě 3E za jejich pracovní nasazení a připravená konstrukční řešení robotů a Filipovi Šípkovi za finalizaci jednoho z robotů a jeho vizualizaci.
Mohlo by vás zajímat:
|
 Přiblížit názorně vývojový proces a konstrukci nového výrobku s vysokým podílem řídicí elektroniky a vývoje programového vybavení, a pokud to bude jen trošku možné, celý projekt realizovat individuálně s každým studentem. Tento cíl jsme si položili na začátku letošního školního roku s rozjezdem nových volitelných předmětů na VOŠ a SPŠ ve Žďáru nad Sázavou. S kolegou Jardou Příbramským jsme hledali nové možnosti nasazení nejnovější řady softwaru ve výuce odborných předmětů s vazbou na elektronizaci a digitální řízení strojů a zařízení.
Přiblížit názorně vývojový proces a konstrukci nového výrobku s vysokým podílem řídicí elektroniky a vývoje programového vybavení, a pokud to bude jen trošku možné, celý projekt realizovat individuálně s každým studentem. Tento cíl jsme si položili na začátku letošního školního roku s rozjezdem nových volitelných předmětů na VOŠ a SPŠ ve Žďáru nad Sázavou. S kolegou Jardou Příbramským jsme hledali nové možnosti nasazení nejnovější řady softwaru ve výuce odborných předmětů s vazbou na elektronizaci a digitální řízení strojů a zařízení.