| Google překladač: |

|

|
Partneři Projektu CAD





Významná aktualizace SprutCAM Tech Robot Calibration |
| Autor článku: SprutCAM Tech (kráceno) | |
|
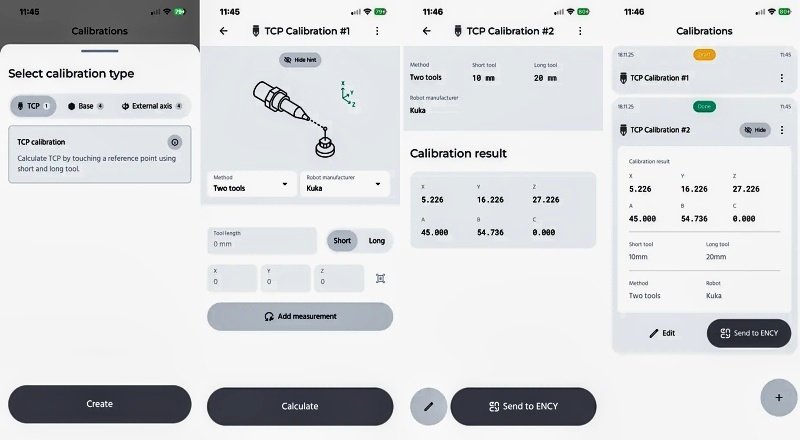
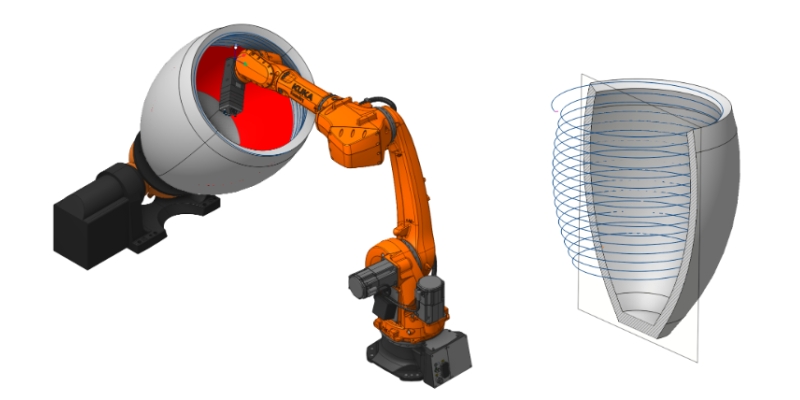
Cílem kalibrace TCP je zjistit přesnou polohu špičky nástroje, kterou lze následně použít jako referenční bod pro systém řízení pohybu robota. Díky tomu může robot důsledně a přesně provádět úlohy, jako je řezání, vrtání a svařování, ve správné poloze. Proces kalibrace obvykle zahrnuje měření polohy různých bodů na nástroji a použití těchto měření k výpočtu polohy TCP. Původní verze aplikace pracovala pouze s roboty tří známých výrobců. Nejnovější verze aplikace SprutCAM Tech Robot Calibration nyní podporuje kalibraci TCP pro roboty následujících značek: FANUC, Kuka, CRP, Denso, Dobot, Estun, Hiwin, Hyundai, Motoman, Newker, Manutec, Nachi, OTC Daihen a Turin. Mobilní aplikace Kalibrace robotů poskytuje uživatelům softwaru SprutCAM X Robot následující výhody:
Inženýr komunikuje s robotem pomocí běžného chytrého telefonu. Stáhněte si a používejte mobilní aplikaci SprutCAM Tech Robot Calibration zdarma z Google Play a Apple Store.
Mohlo by vás zajímat:
|
") Bezplatná mobilní aplikace SprutCAM Tech Robot Calibration je určena k přesné kalibraci středového bodu nástroje (TCP) a automatickému přenosu dat do aplikace
Bezplatná mobilní aplikace SprutCAM Tech Robot Calibration je určena k přesné kalibraci středového bodu nástroje (TCP) a automatickému přenosu dat do aplikace