| Google překladač: |

|

|
Partneři Projektu CAD





Amerika hledá ideální dron pro hasiče |
| Autor článku: FEL ČVUT / redakce | |
|
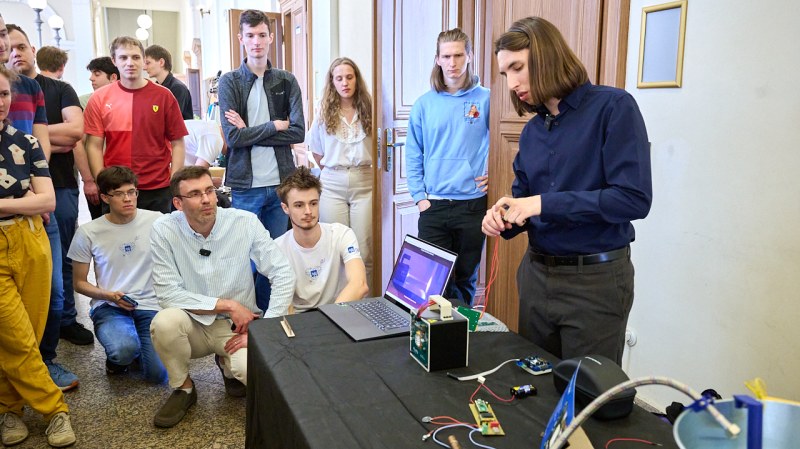
Skupina Multirobotických systémů z Fakulty elektrotechnické ČVUT uspěla v semifinále a postoupila do finále, které proběhne 9.–11. dubna v Kansasu. O ceny v celkové hodnotě 987,5 tisíc dolarů bude soutěžit celkem 11 týmů, které prošly předchozími dvěma koly. 3D Mapping Challenge/UAS 5.0 je jednou ze série soutěží First Responder UAS Challenges, které pořádá Národní institut pro standardy a technologie (NIST) Spojených států amerických. Tyto soutěže podporují rozvoj technologií pro pátrací operace amerických záchranářů. Pro Skupinu multirobotických systémů na FEL ČVUT je to skvělá příležitost, jak uplatnit svoje zkušenosti v oblasti vývoje prototypů vzdušných robotů pro záchranářské operace a otestovat je v těžké konkurenci. V Kansasu soutěžící týmy poprvé předvedou své prototypy dronů naživo, v předchozích dvou kolech porota vyhodnocovala pouze videa soutěžních autonomních robotů řešících zadaný úkol. Skupina vývojářů působících na katedře kybernetiky FEL ČVUT v 3D Mapping Challenge/UAS 5.0 spolupracuje s University of Virginia. Podle pravidel soutěže soutěžící týmy musí mít alespoň jednoho člena ze Spojených států a pražský tým zde mohl navázat na předchozí spolupráci s americkou univerzitou. Podle dostupných informací jsou čeští soutěžící jediným výzkumným týmem mimo USA, který do finále postoupil, a také již za postup do finále získal 15 000 dolarů. V Kansasu se ale bude bojovat o mnohem více než jsou vysoké finanční prémie. Vítězové získají možnost zapojit se do akceleračního programu pro další výzkum a zavedení prototypů do výroby. Jak má vypadat ideální dron pro záchranářeHasiči potřebují při vyšetřování nehod a přípravě na záchranné akce shromažďovat vizuální a lokalizační údaje o konstrukčně narušeném objektu a osobách v objektu, aniž by do něj museli vstoupit. V této situaci je nezbytné mít k dispozici data v reálném čase (více než jen živý videopřenos), aby bylo možné získat přehled o situaci a naplánovat nasazení kritických zdrojů k dosažení cílů mise.
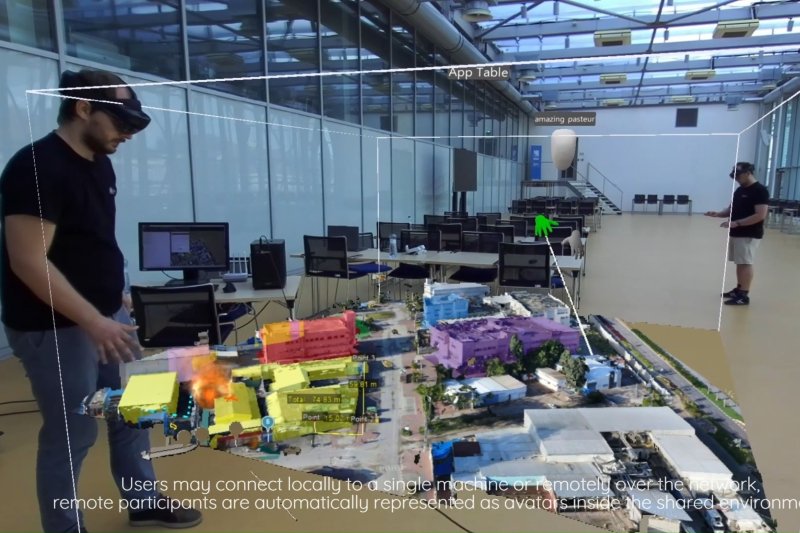
Velitelé zásahu operující v tomto scénáři musí stanovit priority kritických zdrojů a učinit rozhodnutí pro včasnou reakci. Kromě přesné lokalizace osob v objektu by 3D mapa v reálném čase mohla pomoci identifikovat překážky a další nebezpečné situace v okolí osob, které by byly důležité pro plánování vstupních a výstupních tras. Mezi nebezpečí, která je nutné identifikovat, patří kouř, jedovaté plyny, žár a částečně zřícená konstrukce. Všechny tyto obtíže představují problémy nejen pro lidi, ale i pro vyvíjené robotické řešení, které se navíc potýká s omezeným nebo žádným osvětlením a nefunkční lokalizační infrastrukturou, jako je GPS. Z těchto specifikací vycházeli i vývojáři z Fakulty elektrotechnické při vývoji svého prototypu. Na chodbě budovy FEL ČVUT na Karlově náměstí vznikla maketa prostoru o velikosti 10 metrů čtverečních, ve které dron dosud na dálku soutěžil. Cílem je záchranářům zprostředkovat celou mapu prostředí tak, aby viděli všechno, co se v tom prostředí nachází. V 3D Mapping Challenge poprvé pro kompletní orientaci dronu v prostředí jsou využity kamery místo lidaru, a to ze dvou důvodů. Kvůli minimalizaci velikosti a hmotnosti dronu, aby mohl proletět i úzkými prostory, a proto, že kamery jsou ve srovnání s lidary řádově levnější, což nahrává požadavkům na cenovou dostupnost řešení. Potřebám záchranářů vychází vstříc i další prvek prototypu z FEL ČVUT, který bude pro zvýšení bezpečnosti opatřen ochranami vrtulí. Kdyby dron do něčeho narazil, jeho vrtule se nepoškodí, současně budou chráněny i osoby před zraněním.
Mohlo by vás zajímat:
|
") Vývojáři dronů z
Vývojáři dronů z ")