| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 23.06. Konference Advanced Engineering TechDay 2026
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 13.07. AutoCAD – kurz pro středně pokročilé
- 13.07. Trimble SketchUp – základní kurz
- 15.07. Autodesk Inventor – základní kurz

Aktuality
- IMSI Design uvádí na trh TurboCAD Mac 17
- Make-to-Order Days 2026 s vynikajícím výsledkem
- Siemens, Databricks a FFT proměňují výrobní data v škálovatelné poznatky založené na AI
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli
- Mohou simulace a špičkové technologie zajistit obranu Evropy?
- Oficiálně licencovaný simracing volant Ferrari & 24 hodin Le Mans

Možnosti využití systému IP-S2 TOPCON pro potřeby mobilního mapování |
| Úterý, 28 Prosinec 2010 15:35 | |
 Technologický vývoj v oblasti pořizování a zpracování záznamů GNSS přijímačů v kombinaci s využitím záznamů inerciálních měřicích jednotek (IMU) velmi pokročil a na trhu se postupně objevilo několik zařízení, která lze využít pro řešení různých technických úloh souvisejících s pořizováním dat pro potřeby mapování nebo GIS aplikací. Souhrnně se o těchto aplikacích hovoří jako o metodách mobilního mapování (MM). Pod pojmem mobilní mapování se rozumí unikátní technologie umožňující rychlý a především také efektivní sběr geoinformačních dat. Základem jsou tzv. mobilní mapovací systémy, které lze instalovat na vozidla, čtyřkolky, lodě, vrtulníky a případně jiné létající prostředky. Nedílnou součástí této technologie jsou aplikace sloužící ke zpracování pořízených dat a pro následné vyhodnocení zájmových informací z nich. Technologický vývoj v oblasti pořizování a zpracování záznamů GNSS přijímačů v kombinaci s využitím záznamů inerciálních měřicích jednotek (IMU) velmi pokročil a na trhu se postupně objevilo několik zařízení, která lze využít pro řešení různých technických úloh souvisejících s pořizováním dat pro potřeby mapování nebo GIS aplikací. Souhrnně se o těchto aplikacích hovoří jako o metodách mobilního mapování (MM). Pod pojmem mobilní mapování se rozumí unikátní technologie umožňující rychlý a především také efektivní sběr geoinformačních dat. Základem jsou tzv. mobilní mapovací systémy, které lze instalovat na vozidla, čtyřkolky, lodě, vrtulníky a případně jiné létající prostředky. Nedílnou součástí této technologie jsou aplikace sloužící ke zpracování pořízených dat a pro následné vyhodnocení zájmových informací z nich.
Konfigurace mobilního mapovacího systémuMobilní mapovací systémy (MMS) se sice dílčím způsobem od sebe dle výrobců liší, ale některé prvky mají společné. Postupný vývoj systémů přinesl určitou snahu o unifikaci řešení, takže od původních systémů, které byly doslova přidrátovány na střeše mobilního prostředku, se přešlo k sofistikovaným řešením, které mají řídící jednotku, GNSS přijímač, IMU a externí odometry připojitelné ke kolům vozidla. Tato zařízení tvoří základ a slouží především pro určování polohy mobilního mapovacího systému a pro georeferenci dat ze senzorů sloužících k samotné dokumentaci zájmového území. Mezi taková zařízení patří především různé typy digitálních kamer a laserových skenerů. Počet a rozmístění digitálních kamer závisí především na typu aplikace, pro kterou jsou data sbírána, a na způsobu, jakým budou informace ze snímku získány. Některé ze systémů MM jsou vybaveny laserovými skenery. Na začátku vývoje byly používány pouze 3D laserové skenery, které dovolovaly ve statickém režimu po zastavení automobilu naskenovat okolí vozidla a případně pořídit digitální snímky. V současné době jsou používány systémy složené z více skenerů, tzn. 2D skenery, které skenují povrch v dynamickém režimu za pohybu systému po trajektorii. Konfigurace skenerů na vozidle je variabilní vzhledem k počtu a typu skenerů a požadovanému výstupu skenovaných dat.
Mobilní mapovací systém IP-S2 TOPCONJedním z výrobců MMS je japonská firma TOPCON, která nabízí dodávku systému v různých konfiguracích podle zájmu zákazníka. Základem tohoto systému je zkalibrovaná konstrukce IP-S2, na které je umístěna řídící jednotka, tzv. IP-S2 box, která je připojena přes ethernet kabel do počítače. Do této jednotky jsou připojena všechna další zařízení, jejichž základní parametry jsou uvedeny níže. Díky umístění všech potřebných senzorů na kalibrovanou konstrukci je možné celý mobilní mapovací systém připevnit na různé dopravní prostředky. Společnost TOPCON vyvíjela svůj MMS IP-S2 především se záměrem umístění na automobilech a použití pro dokumentaci komunikací a přilehlého okolí. Provedení IP-S2 systému však umožňuje využití i pro jiné aplikace. GEODIS BRNO tak jako první společnost vyzkoušela IP-S2 systém na železnici a na řece. Aplikace IP-S2 na železniciTestování možnosti využití pro železniční aplikace bylo provedeno na v současné době nepoužívané železniční trati v Brně. MMS byl upevněn na speciálně vytvořeném vozíku. Ten byl dále vybaven počítačem pro sběr dat a baterií, která zajišťovala potřebné napájení (obr. 2). Vozík byl během sběru dat tlačen předem definovanou trasou tak, aby mapoval vybrané území. Pořízená data mobilním mapovacím systémem IP-S2 na železnici mohou sloužit pro detailní prostorovou dokumentaci železničního koridoru, inspekce tratě, inventarizace a pasport železničních prvků, jako jsou sloupy, návěstidla, výhybky, semafory a jiné. Využít se dají data i měření průjezdných profilů tunelů.
Umístění IP-S2 aplikace na řeceV případě ověření funkčnosti IP-S2 na řece bylo využito spolupráce s děčínskou pobočkou Státní plavební správy České republiky, která si objednala pilotní projekt. Mobilní mapovací systém byl upevněn na přídi použité lodi tak, aby v zorném poli senzorů nebyla žádná konstrukce (obr. 3). Mobilní mapovací systém IP-S2 v tomto případě najde své uplatnění při mapování řek. Stejně tak jako na silnicích jsou i na řekách dopravní značky, které upravují možnosti plavby a kotvení podél řeky. Rovněž dokumentace skutečného stavu břehů, kotvišť, přístavišť a např. přilehlých stromů je cenou informací pro správce, jakým je plavební správa daného vodního toku.
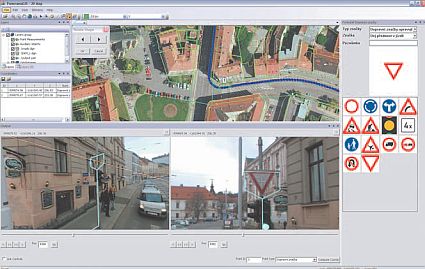
Sběr dat mobilním mapovacím systémem IP-S2Prvotním krokem při mobilním mapování je pořízení dat v zájmové lokalitě. Samotné ovládání probíhá pomocí webové aplikace, kde má uživatel možnost zkontrolovat správnou funkčnost dílčích zařízení a nastavit jejich parametry. V případě digitálních kamer je zde možnost výběru ze dvou režimů řízení expozice. První je založený na časovém intervalu a druhý, více využívaný, na intervalu vzdálenostním, při kterém kamery exponují v závislosti na ujeté vzdálenosti. Proces zpracování dat z mobilního mapovacího systému IP-S2Po pořízení dat v terénu přichází na řadu jejich zpracování neboli tzv. post-processing, který by se dal u MMS IP-S2 pomyslně rozdělit do tří částí. Prvním krokem je výpočet trajektorie pohybu. Další dva kroky zahrnují zpracování snímků z digitálních kamer a dat z laserových skenerů. Způsob výpočtu trajektorie je postaven na integraci dat z GNSS přijímače, IMU, externích odometrů a dat z CAN-BUS sběrnice, což umožňuje dosáhnout požadovaných přesností i v místech, kde je samotné GNSS polohové řešení nespolehlivé či dokonce nemožné, jak je tomu zejména ve městech, kde je příjem signálu z jednotlivých satelitů blokován vysokými budovami, stromy a jinými objekty. Zpracování obrazových dat závisí na typu použitých digitálních kamer. V případě MMS IP-S2 a použití speciální sférické kamery se během zpracování vytvářejí panoramatické snímky s vysokým rozlišením. K takto vytvořeným snímkům se následně vypočítávají prvky vnější orientace na základě vypočtené trajektorie. Výsledná data pak může uživatel využít např. v aplikaci PanoramaGIS, která byla pro tento účel společností GEODIS BRNO vyvinuta (viz obr. 4).
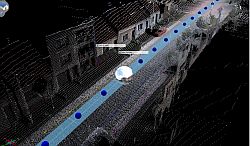
V aplikaci PanoramaGIS se specifické informace získávají ze snímků díky aplikaci průsekové metody fotogrammetrie. V horním okně je zobrazena přehledová mapa (ortofotomapa) společně s polohou projekčních středů. Dvě spodní okna zobrazují panoramatické snímky pro měření se znázorněním zaměřených bodů. Dalším krokem je zpracování dat z laserových skenerů, během kterého jsou data přegenerována do mračna laserových bodů. Každý laserový bod nese informaci o poloze, intenzitě odrazu a barvě. Pro vyhodnocení informací z laserových mračen bodů je možné rovněž použít přímo aplikaci PanoramaGIS. Nedílnou součástí zpracování dat je i následná transformace výstupů do zvolených národních souřadnicových systémů. ZávěrMobilní mapovací systémy jsou schopné rychle pořizovat velké množství geoinformačních dat, která mají požadovaný detail a přesnost. Mobilní mapovací systémy zachycují během sběru dat ve své podstatě obraz virtuální reality, čehož by člověk v terénu stěží byl schopný, navíc na ulicích za plného provozu. Nesmírnou výhodou je i možnost rychlé aktualizace dat pomocí mobilních mapovacích systémů, které jsou schopné v závislosti na dopravě detailně zmapovat řádově desítky kilometrů komunikací a přilehlých území za den. Během testování provedeného společností GEODIS BRNO bylo ověřeno, že TOPCON IP-S2 mobilní mapovací systém je schopný vyhovět všem požadavkům, které jsou obecně žádány po mobilních mapovacích systémech. To je důvod, proč IP-S2 najde své uplatnění i při pasportu dopravního značení a zařízení, stejně tak inženýrských sítí a zeleně, dále pak pro potřeby územního plánování a 3D modelování měst s jejich následnou vizualizací. Autoři pracují ve společnosti GEODIS BRNO.
Mohlo by vás zajímat:
|