| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 22.06. AutoCAD – kurz pro středně pokročilé
- 22.06. Autodesk Maya – úvod do 3D
- 23.06. Konference Advanced Engineering TechDay 2026
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 13.07. AutoCAD – kurz pro středně pokročilé

Aktuality
- IMSI Design uvádí na trh TurboCAD Mac 17
- Make-to-Order Days 2026 s vynikajícím výsledkem
- Siemens, Databricks a FFT proměňují výrobní data v škálovatelné poznatky založené na AI
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli
- Mohou simulace a špičkové technologie zajistit obranu Evropy?
- Oficiálně licencovaný simracing volant Ferrari & 24 hodin Le Mans

Princip pořízení a zpracování leteckých velkoformátových digitálních snímků |
| Pondělí, 23 Květen 2011 11:05 | |
 Cílem tohoto článku je informovat odbornou veřejnost o hlavních rysech technologií na pořízení a zpracování leteckých digitálních velkoformátových snímků. Současná dostupná technologická řešení pro akvizici dat lze rozdělit do dvou základních skupin, a to na senzory řádkové a plošné. Mezi řádkové senzory patří například řešení od firmy Leica, plošné senzory využívají společnosti Carl Zeiss a Microsoft Vexcel. Cílem tohoto článku je informovat odbornou veřejnost o hlavních rysech technologií na pořízení a zpracování leteckých digitálních velkoformátových snímků. Současná dostupná technologická řešení pro akvizici dat lze rozdělit do dvou základních skupin, a to na senzory řádkové a plošné. Mezi řádkové senzory patří například řešení od firmy Leica, plošné senzory využívají společnosti Carl Zeiss a Microsoft Vexcel.
Tyto tři firmy patří mezi hlavní a dominantní dodavatele snímkové techniky. Z této skupiny má největší procentuální zastoupení na trhu společnost Microsoft Vexcel, jejíž špičkovou technologii využívá i naše firma. Komplexní řešení, které nabízí, sestává z portfolia leteckých digitálních měřických kamer řady UltraCam, dále zpracovatelského softwaru a navazujících modulů. Na základě několikaletých praktických zkušeností mohu popsat, jak celý systém pracuje.
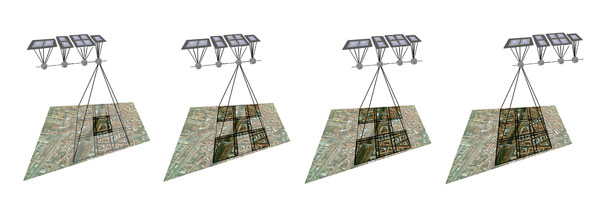
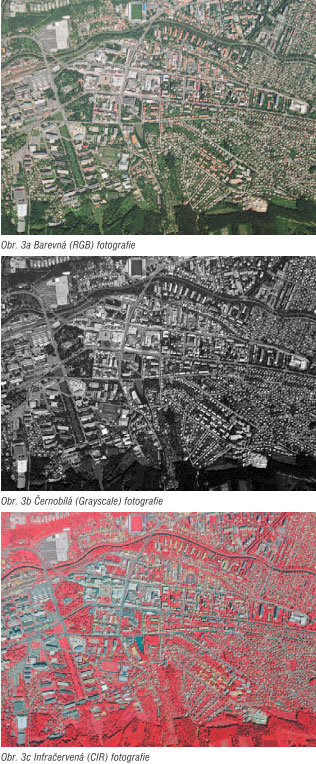
Nutným předpokladem pro získání surových dat je samotný snímkový let. Při něm se letoun pohybuje po naplánovaných náletových osách a kamera UltraCam X v komunikaci s navigačním systémem CCNS4 automaticky exponuje snímek, jakmile se letoun dostane na předem definovanou pozici. Při samotném pořízení snímku proběhne celá sekvence dílčích expozic, z nichž je nutné výsledný snímek vytvořit v prostředí zpracovatelského softwaru Ultramap 2.0. Tato nutnost pramení z konstrukčního principu kamery UltraCam X. Při pohledu na obrázek č. 1 zjistíme, že v senzorové hlavě SX je umístěno celkem 8 objektivů. Objektivy, nacházející se na středové linii SX, pořizují sérii panchromatických snímků s vysokým rozlišením, zatímco zbývající objektivy mají za úkol sbírat data v barevných kanálech RGB a kanálu NIR. Panchromatické snímky jsou pořízeny v rychlé sekvenci za sebou jdoucích záběrů, které jsou exponovány v přesně stanovený moment. Po první expozici následují další v časovém odstupu, jenž vyplývá z rychlosti letounu a rozteče dílčích objektivů. Druhá expozice tedy proběhne poté, co letoun urazí vzdálenost zhruba 8 cm. Tento princip je dobře patrný z přiloženého obrázku č. 2. V polovině tohoto cyklu dochází k pořízení dalších čtyř snímků, z nichž každý zvlášť registruje informaci o jednom kanálu R, G, B a NIR. Barevná a infračervená složka obrazu je zachycena objektivy, které lze rovněž spatřit na obrázku č. 1, umístěné po stranách senzorové hlavy. Rozlišení těchto snímků je třetinové v porovnání s výsledným panchromatickým snímkem. Zde končí pořízení surových dat.
Dalším krokem k získání výsledného snímku je zpracování surových dat v prostředí softwaru Ultramap 2.0 na pozemní stanici. Jedná se o poslední generaci pokročilé technologie zpracování dat, která umožňuje jak globální barevné vyrovnání snímků v rámci zpracovávaného bloku, tak distribuci samotných snímků k jednotlivým jádrům všech procesorů celé počítačové sítě, což celý proces výrazně urychluje.
Tato technologie na rozdíl od předchozí technologie zpracování v prostředí OPC výrazným způsobem zlepšuje celkovou radiometrii nalétnutého bloku, a to mezi snímky jak ve směru letu, tak i mezi snímkovými řadami. Výsledná barevná homogenita zpracovávaného bloku je vyváženější. Závěrem lze říci, že výše popsané technologie a postupy patří mezi dosavadní špičku moderního přístupu k pořizování leteckých dat pro mapování a GIS. Bouřlivý rozvoj digitální fotografie v konzumní sféře probíhal paralelně i v oblasti speciálních aplikací, mezi něž patří i letecké velkoformátové snímkování, díky čemuž dnes můžeme používat senzory, jako je Ultracam X. Autor pracuje ve firmě Argus Geo Systém, s. r. o.
Mohlo by vás zajímat:
|

 Technologie vyvolání je tvořena následujícími kroky:
Technologie vyvolání je tvořena následujícími kroky: