| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé
- 27.07. Autodesk Fusion 360 – základní kurz
- 29.07. AutoCAD – kurz pro středně pokročilé
- 31.07. Trimble SketchUp – prezentace návrhů
- 03.08. AutoCAD – kurz pro pokročilé
- 04.08. AutoCAD kurz – navrhování a správa dynamických bloků
- 05.08. AutoCAD a AutoCAD LT – základní kurz
- 05.08. AutoCAD 2013 - základní kurz

Aktuality
- Grid Dynamics navazuje spolupráci s Doosan Robotics
- Rambam, EOS a PTC plánují digitální implantologické centrum
- Siemens získává Precision Innovations
- Capvidia 2026 R1 s aktualizací pracovních postupů pro Creo a NX
- Spolupráce Siemens a HighByte rozšíří využití průmyslové AI
- Průkopníci technologických inovací se setkají v Darmstadtu
- Když konstrukční kapacita nestačí: jak zrychlit projekty bez ztráty kontroly nad daty a kvalitou
- ABB dokončilo akvizici firmy Specialtrasfo

Optimalizace výrobků pro 3D tisk |
| Autor článku: Petr Fořt | |
| Středa, 25 Listopad 2020 14:34 | |
|
Technické a technologické postupy v on-line laboratořiVysoká dostupnost technického a technologického softwaru pro naše studenty poskytuje jedinečnou možnost spojit práci ve škole s domácím on-line samostudiem. Využili jsme několik zajímavých témat, která byla našim studentům zadána jako dlouhodobější projekty s konzultacemi. Jedním z těchto témat byla konstrukční a technologická příprava výroby robotického ramene řízeného mikropočítači Arduino. Podívejme se na zkušenosti s návrhem robotického ramene, s optimalizací jeho konstrukce a s vlastní strategií výroby. Pro realizaci projektu jsme využili produktů Autodesku řady 2021 a 3D tisku FDM od Prusa Research. Tato kombinace ve spojení s normalizovanými konstrukčními prvky se ukázala jako skvělá možnost nejen projekt připravit v podobě digitálního prototypu, ale také systematicky pracovat na jeho technologické přípravě a výrobě.
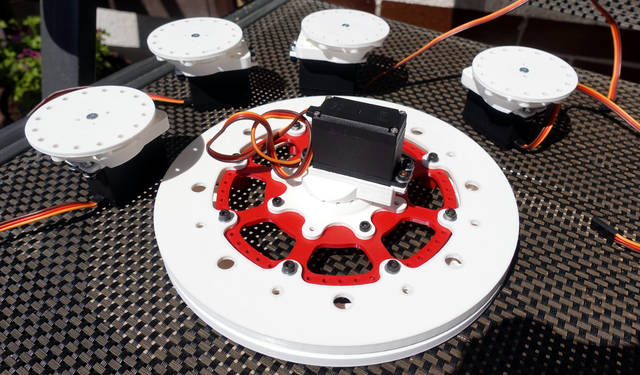
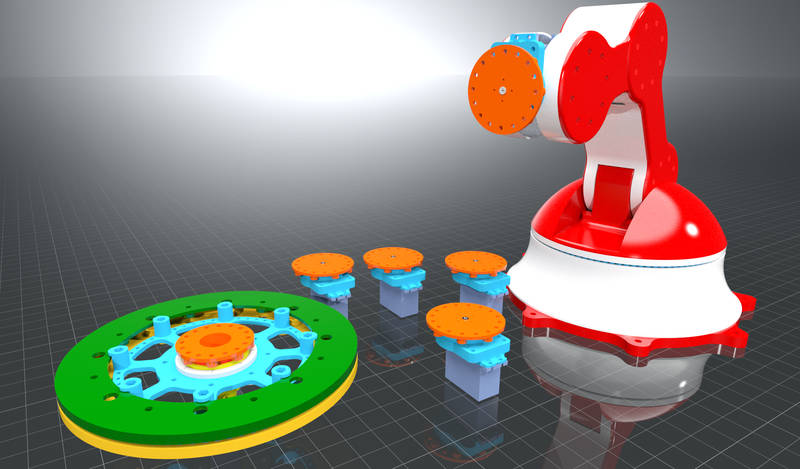
Digitální prototyp ovlivněný technologií výrobyV průběhu projektu bylo naším cílem optimalizovat výrobu robotického ramene s ohledem na jeho konstrukci a design. Cílem již nebylo pouze odladit digitální kinematickou studii, ale také splnit základní požadavky na tuhost robota a přesnost jeho pohybu. Konstrukčně jsme požadovali zapouzdření všech servopohonů pod samonosné kryty, tak aby robot vypadal více jako spotřební elektronika než jako čistě účelově řešený stroj.
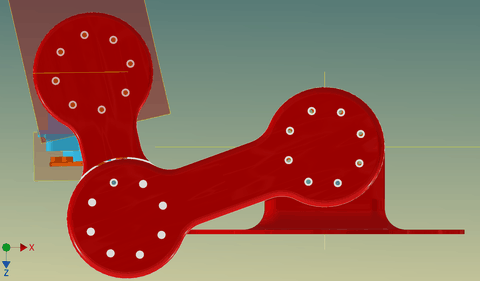
Robotické rameno je poháněno modelářskými digitálními servopohony, které lze efektivně řídit cenově velmi příznivým mikropočítačem Arduino. Nevýhodou tohoto řešení je ovšem nízká axiální a radiální tuhost pohonu. Základem úspěšné konstrukce se pro nás stala optimalizace konstrukce servopohonů pro jejich snadnou zástavbu do robotického ramene s minimalizací zatížení miniaturních ložisek převodovek. Díky FEM analýzám se podařilo navrhnout a vyrobit v krátkém čase modulární adaptéry pohonů s integrovanými robustními ložisky. Příjemným překvapením při testovací výrobě prvního kusu adaptéru byla vysoká přesnost použité metody FDM tisku. V této oblasti opravdu český výrobce boduje na plné čáře. Optimalizace konstrukce s ohledem na 3D tiskOd prvních nápadů jsme pracovali s 3D tiskem jako s finální produkční metodou. S ohledem na náklady a snadné zpracování robota bylo využito levného, ale příjemně zpracovatelného materiálu PLA z dvoukilové cívky. Tento plast se při 3D tisku chová příznivě, je recyklovatelný a má dobré mechanické vlastnosti. Nevýhodou PLA je nízká tepelná odolnost, díky čemu se příliš nehodí pro použití v exteriéru nebo v blízkosti tepelných zdrojů.
Základní otázku, jak součásti spojovat, jsme chtěli vyřešit s minimalizací lepení. PLA plast je dobře lepitelný sekundovým lepidlem a aktivátorem. Uvažovali jsme ovšem více o modulární stavbě robota s variabilní délkou ramen. Využití samořezných šroubů se ukázalo z hlediska nízké teplotní odolnosti PLA plastu jako neefektivní. Při rychlejším dotažení šroubu dochází k jeho intenzivnímu ohřevu a k vytavení závitu. Skvělým konstrukčním řešením je použití klasických šestihranných nebo čtyřhranných matic zapuštěných do slotů. Konstrukce robota byla tomuto montážnímu postupu kompletně přizpůsobena a ukázala se jako efektivní řešení opakovaně rozebíratelných spojů. Při práci se sloty podél vrstev tisku je nutné dávat pozor na roztržení součásti v důsledku případného přesahu matice. Je výhodnější slot vyrobit s menším přesahem, případně matici uvnitř slotu pojistit lepidlem. V několika konstrukčních uzlech robota jsme využili několika typů axiálních a radiálních ložisek. Jejich instalace se ukázala jako bezproblémová i s ohledem na sériovější výrobu. Všechny opakující se tisky dopadly vždy přesně a instalace ložiska s menším přesahem byla vždy precizní. Z pohledu přípravy sériovější výroby pomocí FDM tisku je ovšem dobré po vytištění prvního kusu součást proměřit a optimalizovat její geometrii. Rozměry se lehce liší v závislosti na orientaci tiskových vrstev a úhlech tisku. V absolutních jednotkách se jedná většinou o jednotky setin milimetru.
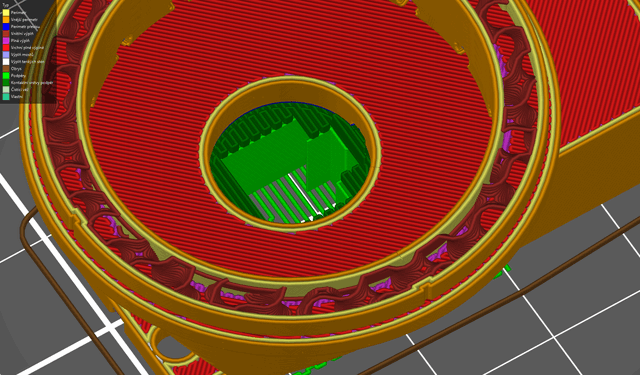
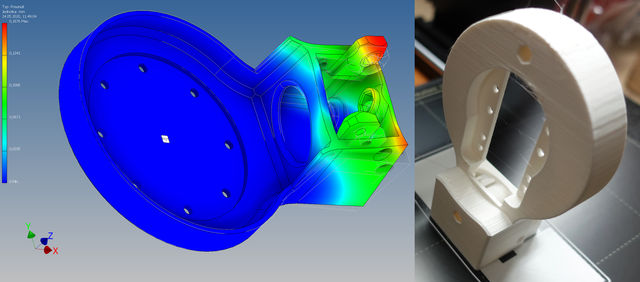
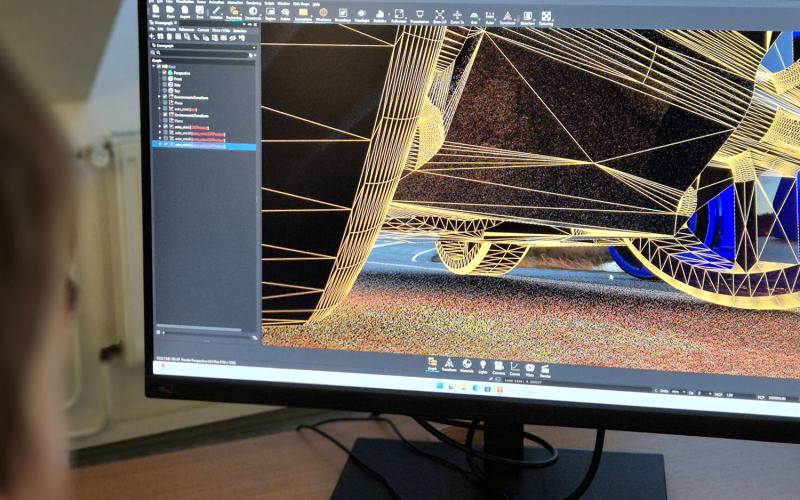
Samostatnou kapitolou výroby byla vhodná volba orientace tisku součásti. Snažili jsme se o minimalizaci množství podpor, které jsou kompenzovány konstrukčními prvky pod maximálním úhlem 45 stupňů. Spolupráce aplikačních řešeníPři práci s 3D tiskem jsme vyzkoušeli hned několik zajímavých řešení Autodesku, která jsou k dispozici v rámci studentské komunity. Základní konstrukce robota byla vytvořena a optimalizována v Autodesk Inventoru 2021. V této aplikaci jsme využili FEM řešič pro analýzu deformace samonosných ramen robota. Některé součásti byly optimalizovány v cloudové aplikaci Autodesk Fusion. Cílem bylo především ukázat další zajímavé možnosti aplikací včetně pro školu nově dostupného generativního designu.
Transfery a zpracování modelů v Prusa Sliceru je z obou produktů zcela bezproblémové. Vždy je vhodné zvážit z hlediska technologie především tloušťku stěny. Po analýzách a ověřovacích testech jsme zůstali u lehké skořepinové konstrukce. Bonusem tohoto řešení je minimalizace zatížení servopohonu a možnost poskytnout jeho krouticí moment větší nosnosti ramen. Více informací o projektech řešených s využitím PLM/BIM technologií v odborné výuce najdete na www.spszr.cz, případně na našem školním Facebooku.
Mohlo by vás zajímat:
|
 Návrh projektů zpracovávaných se studenty lze efektivně spojit s následnou výrobou pomocí 3D tisku. Použitím digitálního prototypu a jeho výroby přímo ze 3D dat získáváme širokou škálu zajímavých možností. V současné době se navíc nemusíme soustředit pouze na jednoduchá konstrukční řešení součástí. Moderní metody výroby poskytují jedinečnou možnost produkce prakticky libovolné geometrie a tvarově náročných součástí. Náš článek věnujeme několika postupům, které jsme využili na VOŠ a SPŠ ve Žďáru nad Sázavou v době letošní on-line výuky při optimalizaci výroby jednoho z projektů robotického ramene.
Návrh projektů zpracovávaných se studenty lze efektivně spojit s následnou výrobou pomocí 3D tisku. Použitím digitálního prototypu a jeho výroby přímo ze 3D dat získáváme širokou škálu zajímavých možností. V současné době se navíc nemusíme soustředit pouze na jednoduchá konstrukční řešení součástí. Moderní metody výroby poskytují jedinečnou možnost produkce prakticky libovolné geometrie a tvarově náročných součástí. Náš článek věnujeme několika postupům, které jsme využili na VOŠ a SPŠ ve Žďáru nad Sázavou v době letošní on-line výuky při optimalizaci výroby jednoho z projektů robotického ramene.