| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 15.07. Autodesk Inventor – základní kurz
- 15.07. AutoCAD Electrical – základní kurz
- 17.07. Autodesk Inventor – kurz iLogic
- 20.07. Blender – úvod do 3D
- 20.07. Blender – úvod do 3D
- 21.07. AutoCAD a AutoCAD LT – základní kurz
- 22.07. Webinář Simulace proudění s volnou hladinou
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé

Aktuality
- Když konstrukční kapacita nestačí: jak zrychlit projekty bez ztráty kontroly nad daty a kvalitou
- ABB dokončilo akvizici firmy Specialtrasfo
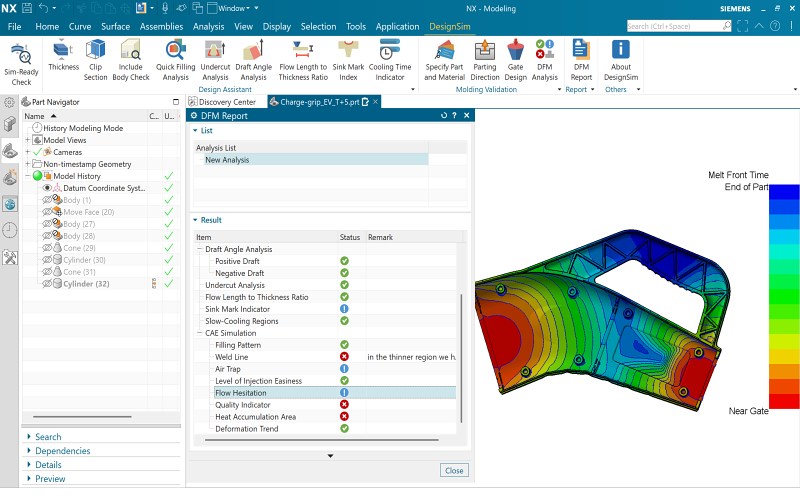
- CoreTech představuje DesignSim pro ověřování DFM v Siemens NX
- OptiTrack vybavuje robotické laboratoře CMU snímáním pohybu
- CoLab 4.0 přináší AI nástroje pro technické revize
- Manuální procesy zpožďují výstavbu potrubních rozvodů
- Co většině týmů uniká při přechodu z 2D na 3D
- Aplikace pro SOLIDWORKS Manufacturing Weeks
Robot SPINNER navržený v CADu |
| Čtvrtek, 11 Červen 2009 15:46 | |
 Vyprávět studentům o mechatronice se dá hodně, ale důležitější je, když mechatronika projde studentům rukama. Studenti tak získají praktické zkušenosti a jsou pak lépe připraveni pro praxi. Model robota SPINNER, o kterém se dočtete dále, vznikl na pracovišti Katedry aplikované mechaniky a mechatroniky Strojní fakulty Technické univerzity v Košicích. Tento mobilní robot slouží jako didaktická pomůcka pro studenty v rámci výuky předmětů oborů Mechatronika a Strojírenství. Inspirací pro návrh tohoto robota byl biologický vzor – šváb. Pokud vezmeme v úvahu rychlost pohybu vzhledem k celkovým rozměrům jeho těla, je šváb nejrychlejším živočichem pohybujícím se po zemi. Není tak divu, že se stal oblíbeným vzorem při konstrukci lezoucích zařízení. Vyprávět studentům o mechatronice se dá hodně, ale důležitější je, když mechatronika projde studentům rukama. Studenti tak získají praktické zkušenosti a jsou pak lépe připraveni pro praxi. Model robota SPINNER, o kterém se dočtete dále, vznikl na pracovišti Katedry aplikované mechaniky a mechatroniky Strojní fakulty Technické univerzity v Košicích. Tento mobilní robot slouží jako didaktická pomůcka pro studenty v rámci výuky předmětů oborů Mechatronika a Strojírenství. Inspirací pro návrh tohoto robota byl biologický vzor – šváb. Pokud vezmeme v úvahu rychlost pohybu vzhledem k celkovým rozměrům jeho těla, je šváb nejrychlejším živočichem pohybujícím se po zemi. Není tak divu, že se stal oblíbeným vzorem při konstrukci lezoucích zařízení.
Funkce a princip pohybu robotaPro vytvoření lokomoce má robot 6 nohou – dvě levé translační nohy, dvě pravé translační nohy a dvě zdvihací nohy (obr. 1). Pohyb těchto dvojic nohou je ovládán pomocí akčních členů – polohových servomechanismů. Vhodnou kombinací pohybů těchto nohou je možno vytvořit lokomoci robota v žádaném směru. Aktivace těchto akčních členů je realizována pomocí mikropočítače. Pomocí vhodného algoritmu je robot schopen pohybovat se dopředu, dozadu, je schopen odbočit vlevo i vpravo, ale i otáčet se na místě jako tank. Studenti si mohou na tomto funkčním modelu robota vyzkoušet své navržené algoritmy jednotlivých typů pohybů. Na obr. 2 je 3D model robota, který byl využit v etapě jeho návrhu. Bylo nezbytné navrhnout celkové uspořádání robota, navrhnout jednotlivé komponenty a jejich vazby a zároveň prověřit kinematiku robota. Konstrukční řešení robotaZákladní desky (obr. 1) tvoří základ celé konstrukční části robota. K nim jsou připevněny všechny ostatní konstrukční prvky (obr. 1), jako jsou servomechanismy a hranoly, ke kterým jsou pomocí závěsů připevněny nohy robota (obr. 3). Obě desky jsou od sebe odděleny distančními sloupky, které tak vytvářejí prostor pro ostatní konstrukční díly a zároveň zvyšují tuhost konstrukce robota. Všechny nohy robota jsou uchyceny pomocí plastových kloubů, které jim umožňují jeden stupeň volnosti (pouze úhlové pootočení v jedné ose). Přední a zadní translační nohy se mohou úhlově natáčet v horizontální rovině a střední zdvihací nohy se mohou natáčet ve vertikální rovině. Jednotlivé nohy (obr. 3) jsou spojeny s unášečem příslušného servomechanismu pomocí dvou kulových kloubů a táhla. Pomocí tohoto spojení je úhlové natočení servomotoru přenášeno na pootočení nohy. Úhlové pootočení přední a zadní nohy je kinematicky navzájem vázáno, protože táhla z těchto nohou jsou ukotvena na unášeči téhož servomotoru (obr. 3). Podobná situace je u zdvihacích (středních) nohou, jejichž pohyb je také kinematicky vázán na unášeč jednoho servomotoru umístěného na spodní straně robota (obr. 3). Tímto vázáním pohybů nohou se zjednoduší algoritmus ovládání servomotorů. V podstatě je třeba vhodně aktivovat tři servomechanismy podle vhodného algoritmu, v závislosti na žádaném směru pohybu. Mikropočítač a pohybové akční členy – servomotoryPro řízení pohybů nohou a vytvoření pohybu robota je vzhledem k jednoduchosti ovládání zvolen programovatelný jednočipový mikropočítač Basic Stamp BS2-IC [2]. Pro vytvoření vlastního pohybu jednotlivých nohou je použit modelářský polohový servomechanismus Futaba S3003, který se skládá ze stejnosměrného motorku, vícestupňové převodovky, zpětnovazebního snímače – potenciometru a řídící elektroniky [1]. Praktické modely zvyšují atraktivnostV současnosti robot obsahuje mikropočítač a zdroj energie (obr. 4). Původní projekt robota počítá s integrací snímačů pro detekci okolí robota a s navigačním systémem s ovládáním pomocí teleoperátora. Momentálně je ve fázi řešení projekt, který by měl vyřešit právě tento problém. Současně se řeší i možnost optimalizace pohybu z hlediska rychlosti prostřednictvím zavedení zpětné vazby s informací o aktuální poloze jednotlivých nohou na vstupy mikropočítače.
Proces výuky ve zmíněných studijních oborech by byl bez těchto praktických modelů dost těžkopádný a nezajímavý. Je důležité, aby studenti měli možnost získat praktické zkušenosti a aby dokázali navrhnout kvalitní konkurenceschopné mechatronické výrobky [3, 4, 5, 6]. Článek byl vypracován s podporou projektů VEGA 1/0201/08 „Výskum štruktúr a správania sa modulov mechatronickej mobilnej technickej sústavy na úrovni orgánov a stavebných prvkov za účelom zlepšenia vlastnosti mobilnej technickej sústavy“, VEGA 1/4164/07 „Výskum špecifických problémov pri meraní dĺžok a bilancovaní neistôt merania“ a VEGA 1/0156/09 „Optimalizácia biomimetického návrhu miniatúrneho mechatronického systému a jeho aplikácia v roji kooperujúcich systémov“. Literatura[1] GREŠ, J.: Didaktický model pohybujúceho sa zariadenia využívajúceho lokomóciu pomocou nôh. Diplomová práca. SjF TU v Košiciach (vedúci: doc. Ing. Michal Kelemen, PhD.). 2005. [2] Parallax Inc. STAMPCOMPARISON.PDF. Revised 03/04, Parallax Inc., 2004, cited 10-22-2004. online <http://www.parallax.com> [3] KONEČNÝ, Z.–MOSTÝN, V. Výpočet kloubových proměnných robotů a manipulátorů s využitím vlastností AutoCADu. Sborník vědeckých prací VŠB–TU Ostrava, 1997, s. 81–84, ISSN 1210-0471. [4] KONEČNÝ, Z.–SKAŘUPA, J.: Variational geometry in design of robots and manipulators. Sborník vědeckých prací Vysoké školy báňské – Technické univerzity Ostrava, roč. XLVII, řada strojní, č.1/2001, Ostrava 2001, ISSN 1210-0471. [5] KARDOŠ, J.: Variable Structure Motion Control Systems. In: Baltazár Frankovič, ed.: Trends in Control Theory and Applications. Veda, Bratislava 1999, pp. 132–158. [6] VITKO, A., ŠAVEL, M., KAMENIAR, D., JURIŠICA, L. Design of Sensor Fusion and Fault Clustering of Legged Robot. In: Measurement and Control in Robotics. IAI, Madrid, Spain 2003, ISBN 84-607-9693-0,1-6.
Mohlo by vás zajímat:
|