| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 17.07. Autodesk Inventor – kurz iLogic
- 20.07. Blender – úvod do 3D
- 20.07. Blender – úvod do 3D
- 21.07. AutoCAD a AutoCAD LT – základní kurz
- 22.07. Webinář Simulace proudění s volnou hladinou
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé
- 27.07. Autodesk Fusion 360 – základní kurz
- 29.07. AutoCAD – kurz pro středně pokročilé

Aktuality
- Průkopníci technologických inovací se setkají v Darmstadtu
- Když konstrukční kapacita nestačí: jak zrychlit projekty bez ztráty kontroly nad daty a kvalitou
- ABB dokončilo akvizici firmy Specialtrasfo
- CoreTech představuje DesignSim pro ověřování DFM v Siemens NX
- OptiTrack vybavuje robotické laboratoře CMU snímáním pohybu
- CoLab 4.0 přináší AI nástroje pro technické revize
- Manuální procesy zpožďují výstavbu potrubních rozvodů
- Co většině týmů uniká při přechodu z 2D na 3D

Aplikace CAD modelů programu MTPro a MPScalc v projektování ručních montážních pracovišť |
| Úterý, 28 Prosinec 2010 11:30 | |
 V souladu s trendem digitalizace procesu tvorby výrobku i procesu navrhování výrobních a montážních uskupení se zvyšuje význam používání 3D modelů jednotlivých prvků, konstrukčních skupin a zařízení. Vývoj v oblasti projektování výrob směřuje k tvorbě digitálních modelů celých výrobních uskupení a k jejich ověřování ještě ve virtuálním prostředí. V této souvislosti se používá termín Digital Manufacturing. K tvorbě takových modelů výrob jsou zapotřebí CAD modely všech výrobních a pomocných prostředků, které se nacházejí na výrobní ploše. Tvorba takových modelů je často rutinní a zdlouhavou činností, která odčerpává zdroje, které by mohly být využity pro tvůrčí činnosti. V důsledku toho roste význam databází 3D CAD modelů technických prvků a zařízení. V souladu s trendem digitalizace procesu tvorby výrobku i procesu navrhování výrobních a montážních uskupení se zvyšuje význam používání 3D modelů jednotlivých prvků, konstrukčních skupin a zařízení. Vývoj v oblasti projektování výrob směřuje k tvorbě digitálních modelů celých výrobních uskupení a k jejich ověřování ještě ve virtuálním prostředí. V této souvislosti se používá termín Digital Manufacturing. K tvorbě takových modelů výrob jsou zapotřebí CAD modely všech výrobních a pomocných prostředků, které se nacházejí na výrobní ploše. Tvorba takových modelů je často rutinní a zdlouhavou činností, která odčerpává zdroje, které by mohly být využity pro tvůrčí činnosti. V důsledku toho roste význam databází 3D CAD modelů technických prvků a zařízení.
Databáze technických prvků a zařízeníV takové podobě, v jaké existují databáze normalizovaných součástí, zatím databáze strojů, dopravníků a dalších zařízení neexistují. Někteří výrobci nabízejí možnost stažení 3D, resp. 2D modelů jimi vyráběných zařízení. Takových firem je však zatím velmi málo. Jednou z nich je například výrobce průmyslových robotů firma Kuka, která nabízí pro každý typ robota 3D model ve více formátech, přičemž podporovány jsou i univerzální výměnné datové formáty, takže je možné je vložit do téměř libovolného CAD systému. Vybraný 3D model je pak možné použít ve zvoleném CAD systému. Způsob, jakým se průmyslový robot zobrazí, závisí na tom, jaký CAD systém se použije. Protože nejsou zachovány vazby 3D modelu, je v případě, že je potřeba pracovat s kinematikou robota, nutno znovu tyto vazby vytvořit, což je časově náročné. Pokud se například 3D model ve formátu stp vloží do CAD systému jako „assembly", lze na základě parametrů robota definovat vazby a pohyb ramene robota v prostoru bude odpovídat zadaným údajům – pohybovým vlastnostem robota (rozsah pohybů ramene apod.). Některé firmy nabízejí i možnost generování varianty zařízení on-line na internetu a následně její stažení ve zvoleném formátu, který je vhodný pro použití v CAD systému, resp. tento model zasílají po registraci e-mailem. Příkladem je firma Boschrexroth [1], která umožňuje takovýto způsob navrhování pro montážní pracoviště. S 3D modelem upraveným podle vlastních požadavků lze dále pracovat, např. jej doplnit vlastními konstrukčními řešeními, dělat úpravy apod. Speciální programové produktyNěkteří výrobci nabízejí speciální programy a nástavby programů (vázané většinou na některý z CAD systémů). Tyto programy, resp. nástavby obsahují pouze jejich výrobky, resp. zařízení. Jako příklad lze uvést speciální programy a nástavby, které nabízí firma Boschrexroth, resp. na Slovensku firma MTS, která ji zastupuje. Prvním příkladem je software MTpro pro plánování a projektování montážních pracovišť a systémů. Software je k dispozici ve formě DVD na základě objednávky na stránce firmy. Obsahuje následující moduly.Modul Layout designer pro plánování a projektování kompletních řešení pracovišť a dopravníků bez CAD systému. Tento modul podle [1] umožňuje:
Modul Product information obsahuje informace o výrobním programu firmy Boschrexroth v následujícím členění:
Modul Generation of CAD models má přímé propojení do běžných typů CAD systémů. Je možné přenášení dat mezi MTpro a FMSsoft. Generované modely lze uložit ve formátu:
CAD modely lze přímo vkládat do následujících verzí CAD systémů:
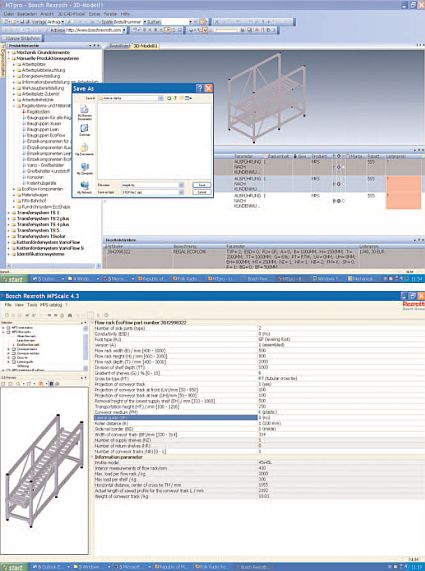
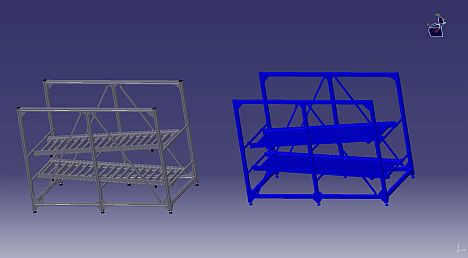
Druhým příkladem je software MPScalc firmy Boschrexroth, což je software pro profesionální dimenzování, konstrukci a výpočty pracovišť a regálových systémů dle potřeb zákazníka. Zadáním požadovaných parametrů zařízení lze dostat poměrně jednoduše transparentní cenovou kalkulaci i detailní 3D model, který lze implementovat ve vlastním projektu a ve zvoleném CAD systému. Tento software je bezplatně k dispozici na stránce výrobce, existuje v několika jazykových modifikacích (německá, anglická, francouzská, španělská, italská, portugalská a švédská verze). Také je možné vybrat variantu, která obsahuje katalog ve formě PDF. Oba softwarové nástroje obsahují všechna zařízení firmy Boschrexroth a vytvoření konkrétního 3D modelu se provádí na základě parametrů (rozměry, zátěž, vybavení, jako např. kolečka apod., materiál atd.). Na obrázku 1 je uveden příklad tvorby modelu regálu jak v MTPro, tak v MPScalcu. Pro ilustraci byly modely následně uloženy ve dvou formátech step a iges. Samozřejmě, že je možné si vybrat i jiné formáty z nabídky softwaru. V daném případě byly modely implementovány v CATII. Na obr. 2 je uveden printscreen obrazovky po vložení obou modelů do CATIE. Tyto modely je někdy třeba ještě upravit, např. změnit barvu, přidat některé vlastnosti (např. materiál), resp. vazby. Takto lze získat 3D modely řady prvků a zařízení a použít je při navrhování pracoviště, resp. systému ve zvoleném CAD systému.
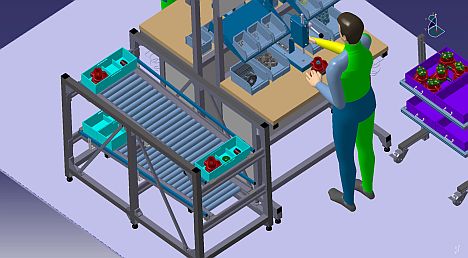
Projekt montážního pracovištěPři navrhování montážního pracoviště je samozřejmě nutné postupovat od analýzy montovaného výrobku přes návrh technologického postupu montáže a výběr technických zařízení. Pro návrh pracoviště například v CATII lze použít existující zdroje 3D modelů prvků a zařízení. Velkou výhodou je, když i montovaný výrobek je navržen v CATII. V příkladu takového řešení montážního pracoviště pro montáž zubového čerpadla (obr. 3) jsou na pracovišti v jednotlivých zásobnících umístěny jednotlivé díly a součástky zubového čerpadla. To umožňuje vytvořit si velmi realistickou představu o celém procesu a zároveň napomáhá při stanovení rozměrů jednotlivých palet, zásobníků, upínačů a podobně. Detaily návrhu, jakož i další varianty pracovišť jsou uvedeny v [3]. Na obrázku 3 lze vidět již zmíněný regál jako součást pracoviště. V případě CATIE je výhodou i to, že je možné následně využít existující nástroje jako ergonomickou analýzu. Na obrázku je možné vidět model člověka – základ pro následnou RULA analýzu. Detailnější údaje o RULA analýze v CAD systému CATIA lze nalézt v literatuře.
ZávěrNa základě zkušeností s aplikací uvedených nástrojů pro tvorbu 3D modelů je možné konstatovat, že získání 3D modelů je relativně jednoduché a rychlé a práce s nimi v některém z CAD systémů, např. v CATII, je v podstatě bezproblémová. V projektu je samozřejmě možné kombinovat různé zdroje 3D modelů a v případě aplikace unikátních prvků a zařízení zároveň vytvářet vlastní 3D modely. Vytvořený projekt jako celek je tedy poskládán z 3D modelů z různých zdrojů. Jedinou nevýhodou těchto softwarových produktů je to, že obsahují pouze zařízení jednoho výrobce. I když je výrobní program, jako například v případě firmy Bosch Rexroth, široký a pro oblast ruční montáže téměř kompletní, co se týká základních komponent. Samozřejmě, že ne vždy je možné použít tyto 3D modely, a to tehdy, pokud je z jakýchkoliv důvodů (např. cena) nezbytné použít jiné základní prvky a zařízení. V takovém případě se často nelze vyhnout i 3D modelování technických prvků a zařízení. Literatura[1] Bosch Rexroth AG, dostupné na internetu: . [2] Cvetković, Slavica: Modeliranje i upravljanje logističkim sistemom " VIII međunarodna naučno-stručna konferencija MMA 2003, Novi Sad 2003, ISBN 86-85211-96-4. [3] Emodi, A.: Projekt montáže zubového čerpadla. [Bakalárska práca], KTaM, SjF TU v Košiciach, Košice, 2010. [4] Fedorko, G.: Model dopravníka. In: Transport & Logistics: International journal. 2003, ISSN 1451-107X, s. 367–370. [5] MTS, spol. s r. o., dostupné na internetu . [6] Senderská, K., Mareš, A., Fabian, M.: Praktická aplikace ergonomických modulů CATIE při analýze ručního montážního pracoviště. In: IT CAD: Dvouměsíčník o CAD, počítačové grafice a CA.. technologiích. Vol. 18, no. 2 (2008), p. 18–19. ISSN 1802-0011. [7] Václav, Š., Peterka, J., Pokorný, P.: Objective method for assembly. In: Annals of DAAAM for 2007 & Proceedings of the 18th International DAAAM Symposium "Intelligent Manufacturing & Automation. 2007, Vídeň: DAAAM International Vienna. ISBN 3-901509-58-5, s. 797–798.
Mohlo by vás zajímat:
|