|
Tags: Automatizace | Igus | Ovládací systém | Programování | Robot Control | Roboty ") Německá firma igus vyvinula řídicí software pro řešení nízkonákladové automatizace, který uživatelům umožňuje snadno programovat své roboty. Software igus Robot Control je k dispozici on-line zdarma a nabízí uživateli snadný úvod do automatizace. S novým softwarem lze naprogramovat a řídit různé kinematiky robotů. Digitální dvojčata simulují pohyby. To umožňuje uživateli naprogramovat vhodné řešení před zakoupením robota. Robotický hardware, například lineárního robota se spínací skříní, nabízí igus za přibližně 5400 $. Německá firma igus vyvinula řídicí software pro řešení nízkonákladové automatizace, který uživatelům umožňuje snadno programovat své roboty. Software igus Robot Control je k dispozici on-line zdarma a nabízí uživateli snadný úvod do automatizace. S novým softwarem lze naprogramovat a řídit různé kinematiky robotů. Digitální dvojčata simulují pohyby. To umožňuje uživateli naprogramovat vhodné řešení před zakoupením robota. Robotický hardware, například lineárního robota se spínací skříní, nabízí igus za přibližně 5400 $.
Rozmanité použití robotů
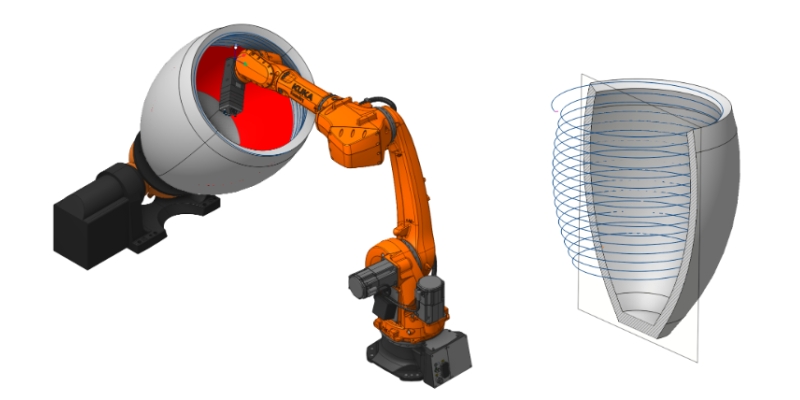
Vyzvednutí zboží z krabice, pomoc s odebíráním vzorků a výdejem předmětů ze stroje je možné pomocí robotů. Ať už se jedná o kloubové roboty, delta roboty nebo lineární roboty, má igus ve svém portfoliu všechny tři kinematiky jako řešení nízkonákladové automatizace. Igus nabízí igus Robot Control, bezplatný software pro simulaci a programování všech igus robotů, aby si uživatelé mohli předem vyzkoušet, který robot je pro jejich aplikaci nejvhodnější.
V softwaru existuje digitální dvojče pro všechny roboty igus, které lze simulovat a učit jako skutečného robota. Řídicí systém robota se později také používá pro intuitivní programování robota. Každý program lze následně aplikovat na skutečného robota. Kompletní hardwarový balíček – například lineární drylin robot s integrovaným systémem ovládání ve spínací skříni – je k dispozici za přibližně 5400 $.
Snadné programování robotů
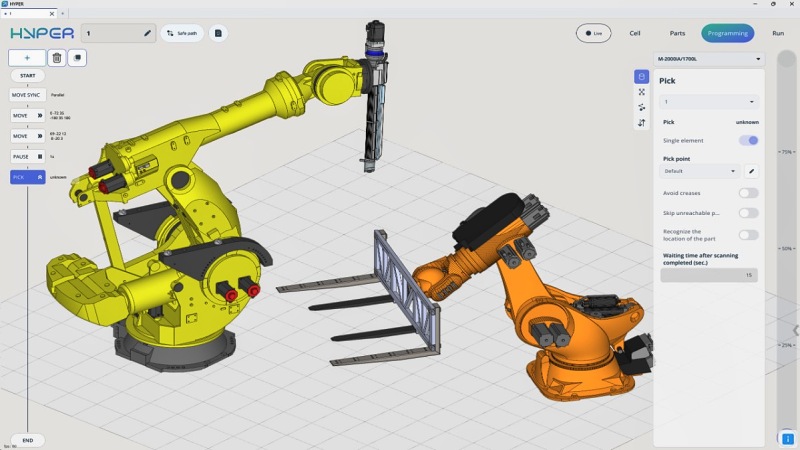
S igus Robot Control může uživatel volně přesouvat všechny osy digitálního dvojčete prostřednictvím 3D rozhraní. Pomocí funkce Teach-in může být robot docela snadno programován, a to i bez jeho připojení. Uživatel musí ručně nastavit robota do požadované polohy a definovat, jak má být pohyb proveden. Proces se opakuje, dokud se nevytvoří požadovaný profil pohybu. Snadno lze přidat odpovídající koncové efektory, jako jsou chapadla, a střed nástroje se nastaví automaticky.
Navrhnout lze také virtuální ohraničení, aby se například zabránilo robotům v kolizi se strojem. Ovládání igus robota lze také připojit k nadřazenému řídícímu systému, a to buď prostřednictvím rozhraní Digital IO, nebo ethernetovou komunikací s použitím IP adresy. Vývojáři igusu chtějí řídicí systém ještě více rozšířit. V budoucnu chtějí nabídnout cloudové služby, jako je integrace vidění, vzdálené uvedení do provozu a také on-line školení za nízkou cenu, které si zákazník může zarezervovat. Jako cloudová řešení jsou plánovány i další služby, jako je vyhodnocení obrazu přes webkameru nebo řešení pro výběr zásobníku. |