| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 22.07. Webinář Simulace proudění s volnou hladinou
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé
- 27.07. Autodesk Fusion 360 – základní kurz
- 29.07. AutoCAD – kurz pro středně pokročilé
- 31.07. Trimble SketchUp – prezentace návrhů
- 03.08. AutoCAD – kurz pro pokročilé
- 04.08. AutoCAD kurz – navrhování a správa dynamických bloků
- 05.08. AutoCAD a AutoCAD LT – základní kurz

Aktuální články
- Pozvánka na 3. ročník WORLD OF MACHINING
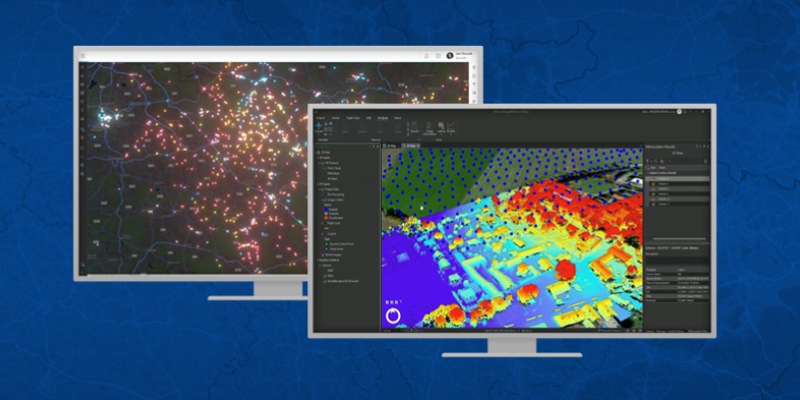
- Esri vydává ArcGIS Velocity pro vlastní hostování
- Dotace na odborné školení zaměstnanců
- Realizujeme projekty na škole s využitím 3D tisku, 14. díl
- AMB 2026: Kolaborativní procesy jako hnací síla automatizace
- Seznamte se s BCN3D Omega I60 G2
- FARO CREAFORM rozšiřuje portfolio zařízení HandySCAN 3D
- Dell Pro 3 14 a 16: Firemní notebooky s procesory Intel a AMD

FEL ČVUT představila inovace pro vzdušné roboty |
| Středa, 26 Duben 2023 22:05 | |
|
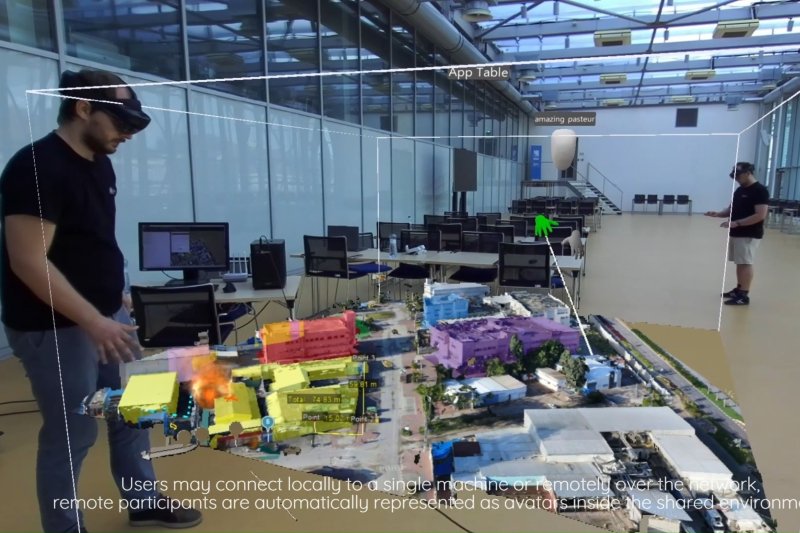
GPS Spoofing je inteligentní forma rušení, při níž dron obdrží falešné GPS signály šířené z nepřátelského vysílače a „uvěří“, že je na jiném místě. Spoofingové útoky jsou stále častějším prostředkem manipulace zejména ve válečných konfliktech, jejich důsledkem může být zneužití a přesměrování vzdušných robotů nepřítelem k útoku na vlastní zařízení, případně lze drony tímto způsobem donutit k přistání tak, aby se ocitly v rukách protivníka. V posledních letech byly zaznamenány stovky případů spoofingu a s rostoucím nasazením bezpilotních prostředků zejména na bojištích v Ukrajině roste význam adekvátní obrany proti nim. Řešení, které vzniklo ve skupině Multirobotických systémů, využívá palubních senzorů dronu a palubní umělé inteligence. Vyvíjená metoda je schopna detekovat, že se dron odchýlí od původního zadání a začne se náhle chovat jinak. Systém to vyhodnotí jako útok a přepne dron do režimu, ve kterém bude nepřátelské GPS souřadnice ignorovat a bude se při letu řídit podle palubní umělé inteligence a senzorů, které má k dispozici. Druhá metoda ochrany proti GPS spoofingu, kterou skupina MRS ověřuje při letových zkouškách, spočívá ve vyfiltrování a zesílení původního GPS signálu, tak aby se dron řídil podle něj a nenechal si vnutit falešné souřadnice od nepřítele. Roj plně autonomních dronů s palubní umělou inteligencí se chová podobně jako hejno ptákůSkupina výzkumníků z Fakulty elektrotechnické ČVUT v tomto projektu dokáže zúročit zkušenosti z létání ve ztížených podmínkách bez GPS signálu v soutěžích, jako byla neoficiální olympiáda robotiků organizovaná americkou vládní agenturou DARPA v roce 2021 či MBZIRC v Abu Zabí, z jehož posledního ročníku v roce 2020 vzešla jako celkový vítěz. Drony naprogramované vědci z Karlova náměstí světovou konkurenci převyšují nejvyšší mírou autonomie, díky níž ve vzduchu tvoří tým samostatných a současně spolupracujících robotů. Ačkoli si během letu předávají minimum informací, jsou podobně jako hejno ptáků schopné zpracovávat vnější podněty a přizpůsobovat své chování změnám v okolním prostředí. Obdobně jako ptáci, využívají přítomnost ostatních robotů ve svém okolí a sdílenou inteligenci roje v místech, kde senzorické vybavení jedince nestačí a samostatně letící dron by selhal. Schopnost létat v kompaktní dynamické formaci tvořené dvaceti autonomními drony byla rovněž předmětem letových ukázek v Temešváru poblíž Písku, kde bezmála sedmdesát robotiků z MRS na katedře kybernetiky FEL ČVUT v Praze s drony ve vzduchu ověřuje výsledky svého základního výzkumu. Šlo o ojedinělou příležitost vidět výsledky jejich výzkumu při rozsáhlých praktických letových ukázkách, které lze realizovat jen v odlehlých oblastech mimo Prahu. Dron pomůže lesníkům. Se speciální kamerou odhalí kůrovce již v raném stádiu napadení stromu
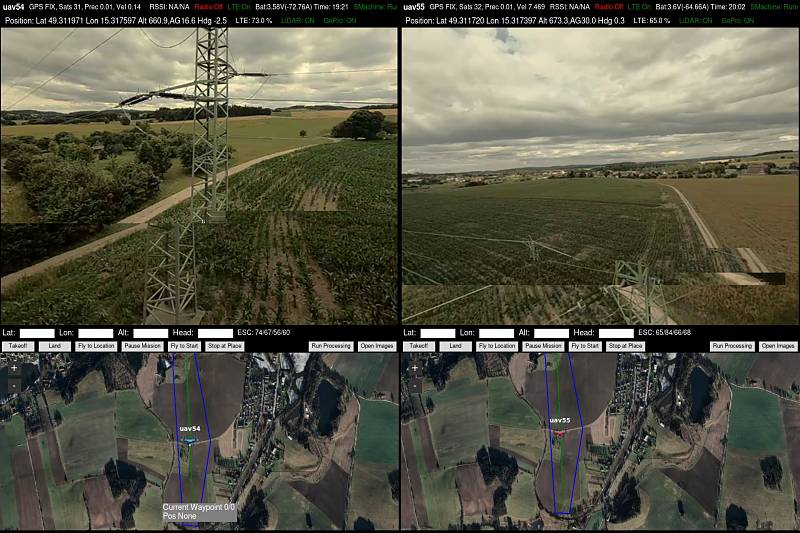
Strom, ve kterém se již škůdce zabydlel, je potřeba co nejdříve vyhledat, ošetřit nebo odstranit. A právě na tuto fázi dohledání konkrétního napadeného stromu se výzkumníci z MRS FEL ČVUT soustředí. Nejtěžší robotickou úlohou, kterou v této aplikaci museli řešit, je přelet dronu z prostředí s GPS vně lesa dovnitř porostu mezi stromy, kde kvalita GPS signálu není dostatečná. Dron se s využitím 3D lidaru a palubní inteligence dokáže uvnitř lesa lokalizovat, vyhýbat se překážkám a doletět na místo, kde se očekává výskyt napadeného stromu. Vlastní dohledání stromu probíhá s pomocí RGB kamery a neuronové sítě na palubním počítači. Jakmile dron identifikuje znaky přítomnosti kůrovce (miniaturní otvory v kůře), autonomně jej označí barvou. Lesník pak může jít najisto.
Metoda, kterou skupina MRS vyvinula ve spolupráci s komerčním sektorem, splňuje všechny předpoklady k reálnému nasazení – je rychlá, ekonomicky únosná (představte si, že by podobná inspekce lesa probíhala například z vrtulníku) a přesná, protože dron uvnitř lesa označí konkrétní strom a ne jen přibližnou lokalitu určenou v lese nepřesnou GPSkou, jak je tomu u současných řešení.
Mohlo by vás zajímat:
|
") Skupina Multirobotických systémů (MRS) působící na katedře kybernetiky
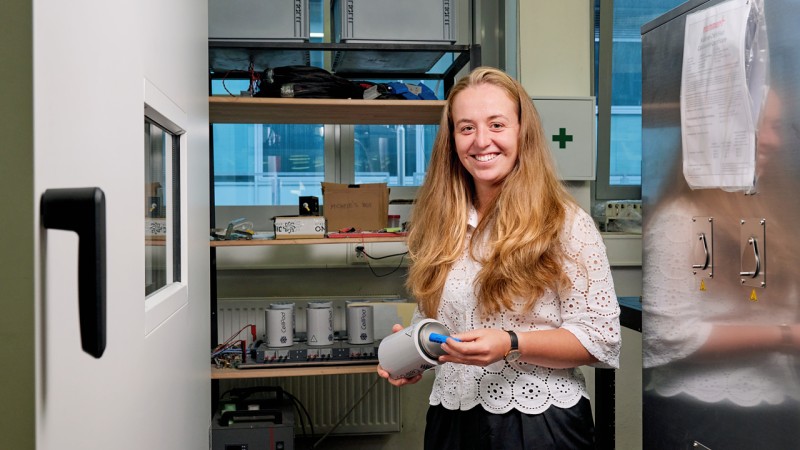
Skupina Multirobotických systémů (MRS) působící na katedře kybernetiky ") Příkladem konkrétní aplikace, ve které mohou drony zvládnout zadané úkoly mnohem rychleji a levněji než člověk, je metoda detekce stromů napadených kůrovcem. Řešení, které ve skupině Multirobotických systémů vyvinula studentka magisterského studia programu Kybernetika a robotika Tereza Uhrová ve spolupráci se společnostmi Eurosecur a Fly4Future, využívá schopnost autonomního dronu letět lesem bez GPS. Skupina MRS dron vybavený sprejem pro označování napadených stromů v Temešváru předvedla při praktické letové ukázce. Nasazení létajícího robotu uvnitř lesa využívá data, která byla získána druhým větším dronem vybaveným multispektrální kamerou, která z výšky snímá les a dokáže z této perspektivy identifikovat i pro člověka neznatelné odlišnosti v barevném spektru. Přítomnost škodlivého brouka totiž vystavuje napadený strom stresu, který se začne projevovat v barvě jehličí už v počátečních fázích, kdy je jinak stávajícími metodami velmi obtížné jej odhalit.
Příkladem konkrétní aplikace, ve které mohou drony zvládnout zadané úkoly mnohem rychleji a levněji než člověk, je metoda detekce stromů napadených kůrovcem. Řešení, které ve skupině Multirobotických systémů vyvinula studentka magisterského studia programu Kybernetika a robotika Tereza Uhrová ve spolupráci se společnostmi Eurosecur a Fly4Future, využívá schopnost autonomního dronu letět lesem bez GPS. Skupina MRS dron vybavený sprejem pro označování napadených stromů v Temešváru předvedla při praktické letové ukázce. Nasazení létajícího robotu uvnitř lesa využívá data, která byla získána druhým větším dronem vybaveným multispektrální kamerou, která z výšky snímá les a dokáže z této perspektivy identifikovat i pro člověka neznatelné odlišnosti v barevném spektru. Přítomnost škodlivého brouka totiž vystavuje napadený strom stresu, který se začne projevovat v barvě jehličí už v počátečních fázích, kdy je jinak stávajícími metodami velmi obtížné jej odhalit.")