| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 18.06. AutoCAD kurz – vytváření a prezentace 3D modelů
- 18.06. Autodesk Inventor – návrh plechových dílů a součástí (Sheet Metal Design)...
- 22.06. AutoCAD – kurz pro středně pokročilé
- 22.06. Autodesk Maya – úvod do 3D
- 23.06. Konference Advanced Engineering TechDay 2026
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz

Aktuality
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli
- Mohou simulace a špičkové technologie zajistit obranu Evropy?
- Oficiálně licencovaný simracing volant Ferrari & 24 hodin Le Mans
- ENCY Software podporuje robotickou výrobu soch v USA
- nanoCAD V26 v české verzi od 15. června
- Vizuální obsah bez čekání a přímo z 3D CAD dat
CAD + čtyři nohy + lokomotion = Youpy |
| Pondělí, 07 Prosinec 2009 11:39 | |
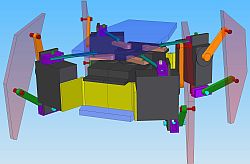 Robot Youpy patří mezí kráčející mobilní servisní roboty, přičemž využívá lokomoci pomocí čtyř nohou. Jeho konstrukce vychází z biologické inspirace čtyřnohými živočichy. Jeho nohy jsou tvořeny dvěma rovinnými kloubovými rotačními vazbami. Protože každá noha je řízena samostatně, má výborné předpoklady pro pohyb v členitém terénu. V článku je popsán jeho vývoj a návrhy pro další směřování jeho vývoje. Původní návrh a uskutečnění myšlenky do 3D probíhalo samozřejmě za pomoci CADu. V tomto případě byl použit CAD systém Solid EDGE. Robot Youpy patří mezí kráčející mobilní servisní roboty, přičemž využívá lokomoci pomocí čtyř nohou. Jeho konstrukce vychází z biologické inspirace čtyřnohými živočichy. Jeho nohy jsou tvořeny dvěma rovinnými kloubovými rotačními vazbami. Protože každá noha je řízena samostatně, má výborné předpoklady pro pohyb v členitém terénu. V článku je popsán jeho vývoj a návrhy pro další směřování jeho vývoje. Původní návrh a uskutečnění myšlenky do 3D probíhalo samozřejmě za pomoci CADu. V tomto případě byl použit CAD systém Solid EDGE.Princip pohybu robotaHlavní funkcí robota je pohyb v členitém terénu za účelem plnění manipulačních prací apod. Konstrukce robota vychází z uspořádání naznačeného na kinematickém schématu, přičemž jednotlivé nohy jsou dvěma rovinnými klouby. Při návrhu kinematiky nohou byly využity čtyřkloubové rovinné mechanismy, které se vyznačují několika výhodami vyplývajícími z jejich konstrukce [1]. Konstrukční řešení robotaNa základě analýz byl vybrán jako akční člen polohový servomechanismus typu GWS S03N (maximální točivý moment 0,24 Nm, maximální rychlost otáčení 0,23 sec/60°). Jde o servomechanismus využívaný zejména v RC modelech pro polohování mechanismů. Rozsah úhlového natočení je 180°. Zadávání žádané hodnoty úhlu natočení je realizováno pomocí šířkovo-impulzně modulovaného signálu obvykle používaného u těchto typů zařízení. Obr. 2 Dva pohledy na 3D model robota Rám konstrukce je tvořen základovými deskami, ke kterým jsou připevněny servomechanismy pro natáčení kyčelních kloubů. Samotný kyčelní kloub je tvořen rovinným kloubem realizovaným přímo mezi kryty polohových servomechanismů určených pro pohon kyčelního a kolenního kloubu. Hnací rotační účinek kyčelního polohového servomechanismu je z výstupního hřídele servomechanismu dále přenášen pomocí pákového (klikového) mechanismu, který spolu s bederním kloubem tvoří nepravidelný čtyřkloubový mechanismus. Tento mechanismus vznikl jako modifikace původní myšlenky paralelogramu.  Obr. 3 Čtyřkloubový mechanismus nohou Na 3D modelu robota byly simulovány pohybové trajektorie jednotlivých kloubů a byly ověřeny jednotlivé stavy, při nichž by mohlo docházet k nežádoucím interferencím. Tento návrh byl následně realizován v podobě funkčního modelu.  Obr. 4 Youpy jako nosič kamery Řízení pohybu robotaŘízení pohybu robota kráčejícího pomocí čtyř nohou je náročnější než u robotů se šesti a více nohami. Robot v této konfiguraci nemá přirozenou stabilitu, jako mají roboty s více nohami. Tento typ pohybu musí být realizován tak, aby se při vlastním pohybu přesouvalo těžiště a robot si zachovával stabilitu. Při každé fázi pohybu musí stát robot minimálně na třech nohách, přičemž jeho těžiště musí být uvnitř trojúhelníku, který opisují kontaktní body těchto tří nohou s podložkou. Čtvrtá noha přitom musí realizovat přesun do nové polohy. Takto postupně dojde k přesunu všech čtyř noh, a tedy i celého robota. Cyklickým opakováním této sekvence je možné dosáhnout výsledného pohybu v žádaném směru.Pro testování algoritmu lokomoce byl experimentálně použit jednočipový mikropočítač Basic Stamp 2. Při těchto experimentech byl mikropočítač a zdroj energie umístěn mimo robota a řídící signály a energie byly distribuovány pomocí kabelů.  Obr. 5 Řešení jednotlivých částí „kloubů mechanismu“ Maximální rychlost pohybu robota po rovinném povrchu, která byla dosažena, byla 0,025 m/s. Mikropočítač realizoval taktování pohybu na základě zvoleného algoritmu a informaci o úhlu natočení jednotlivých kloubů. Tyto doby trvání pohybů budou závislé na zatížení jednotlivých akčních členů a velikosti napájecího napětí energetického zdroje. Účel, očekávání, vývojTento robot byl vyvinut jako didaktická pomůcka pro výuku předmětů na cvičeních ve studijních programech Mechatronika a Všeobecné strojírenství. Z tohoto důvodu byly při jeho realizaci použity transparentní materiály.Kráčející robot disponuje osmi nezávisle řízenými stupni volnosti (tj. osmi akčními členy), což způsobuje komplikovanější algoritmus pohybu. Oproti kolečkovým robotům však tento způsob pohybu umožňuje překonávat členitý terén (relativně vysoké překážky, prohlubeniny, strmé svahy apod.). Protože dochází k neustálému rozjezdu a brzdění pohybů použitých akčních členů, je tento pohyb oproti kolové lokomoci energeticky náročnější.  Obr. 6 Pohled na praktickou realizaci robota Youpy Obr. 6 Pohled na praktickou realizaci robota YoupyVšechny popsané výhody a nevýhody vyplývají z konstrukční povahy noh. Jde o soustavy několika kinematických dvojic, které jsou samostatně řízeny během jednoho kroku. Proto jsou kráčející mobilní roboty oproti kolovým mnohem náročnější ve všech fázích vývoje projektu. Většina zkonstruovaných robotů jsou pouze laboratorní exempláře určené pro didaktické účely. Jen nepatrné procento najde uplatnění i v praktických aplikacích. Náš Youpy však bude po akademické půdě kráčet dále. Vpřed ho bude hnát další vývoj a následné vylepšení. Literatura
Autoři pracují na Strojnické fakultě TU v Košicích. e-mail: cad@ccb.cz
Mohlo by vás zajímat:
|