| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 22.06. AutoCAD – kurz pro středně pokročilé
- 22.06. Autodesk Maya – úvod do 3D
- 23.06. Konference Advanced Engineering TechDay 2026
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 13.07. AutoCAD – kurz pro středně pokročilé

Aktuality
- IMSI Design uvádí na trh TurboCAD Mac 17
- Make-to-Order Days 2026 s vynikajícím výsledkem
- Siemens, Databricks a FFT proměňují výrobní data v škálovatelné poznatky založené na AI
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli
- Mohou simulace a špičkové technologie zajistit obranu Evropy?
- Oficiálně licencovaný simracing volant Ferrari & 24 hodin Le Mans

Transformer–rekonfigurovatelný mobilní robot Wheeking 1 |
| Úterý, 28 Prosinec 2010 09:32 | |
 V moderním světě vývoj mobilních robotů postupuje takovým intenzívním tempem, že to už sotva stíháme sledovat. Různé variace, od robotů na kolovém podvozku, přes kráčející až po složitější určené pro pohyb ve vzduchu, nacházejí uplatnění v rozličných odvětvích činnosti. Ve stále častějších situacích ale narůstá potřeba jednotlivé variace slučovat a vytvořit tak mobilní roboty se schopností rekonfigurovat se. V podstatě v animovaném světě pohádek a v hračkářských obchodech tomu říkáme „transformery". Roboti mnoha tváří a nekonečné funkčnosti. Všichni víme, že pohádky snesou i hodně fantastického. Ale proč se jimi neinspirovat?
My jsme se uskromnili s tím, aby se náš robot uměl „koulet i chodit". Odborně vyjádřeno: cílem bylo vytvořit takového robota, který by byl schopen uspokojit všechny požadavky kladené na roboty s kolovým a kráčející podvozkem současně, přičemž přechod ze čtyřkolové koncepce na čtyřnohou kráčející by se uskutečnil tehdy, když by před robotem nacházející se překážka nebyla koly překonatelná. V moderním světě vývoj mobilních robotů postupuje takovým intenzívním tempem, že to už sotva stíháme sledovat. Různé variace, od robotů na kolovém podvozku, přes kráčející až po složitější určené pro pohyb ve vzduchu, nacházejí uplatnění v rozličných odvětvích činnosti. Ve stále častějších situacích ale narůstá potřeba jednotlivé variace slučovat a vytvořit tak mobilní roboty se schopností rekonfigurovat se. V podstatě v animovaném světě pohádek a v hračkářských obchodech tomu říkáme „transformery". Roboti mnoha tváří a nekonečné funkčnosti. Všichni víme, že pohádky snesou i hodně fantastického. Ale proč se jimi neinspirovat?
My jsme se uskromnili s tím, aby se náš robot uměl „koulet i chodit". Odborně vyjádřeno: cílem bylo vytvořit takového robota, který by byl schopen uspokojit všechny požadavky kladené na roboty s kolovým a kráčející podvozkem současně, přičemž přechod ze čtyřkolové koncepce na čtyřnohou kráčející by se uskutečnil tehdy, když by před robotem nacházející se překážka nebyla koly překonatelná.
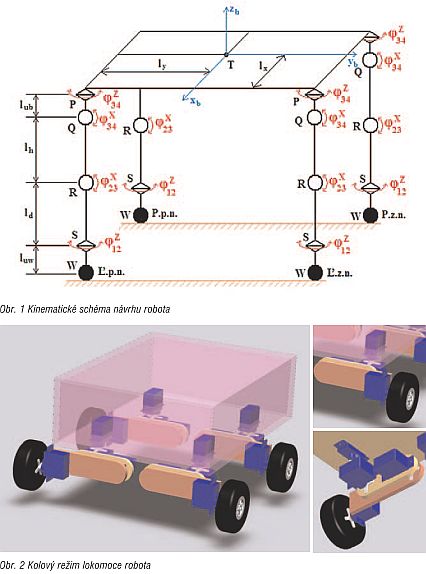
Jak probíhal vývoj konstrukce robotaRekonfigurovatelný mobilní robot, který byl řešen v rámci diplomové práce na Katedře aplikované mechaniky a mechatroniky na Technické univerzitě v Košicích, se skládá z rámu a karosérie, ke kterým jsou bederními klouby připevněny nohy. Noha se skládá z horní a dolní části, které jsou navzájem spojeny kolenním kloubem. Polohovými servomechanismy poháněná kola jsou umístěna na konci spodních částí nohou, které jsou během režimu s kolovým podvozkem podklopené pod spodní plochou karosérie. Jakmile dojde k transformaci na kráčející podvozek, nohy se vyklopí a namísto běhounové části kol bude robot stát na bočních stranách kol, plnících funkci chodidel. Po analýze současného stavu řešené problematiky bylo nutné provést návrh v rané fázi konstrukčního procesu (obr. 1). Postupovalo se podle etap návrhu mechatronického výrobku, počínaje stručným popisem a ideovým modelem problémové oblasti, přes znalostní modely vlastností a popis logického chování, až po principiální návrh v podobě 3D modelu s podporou CAD [1, 2, 3].
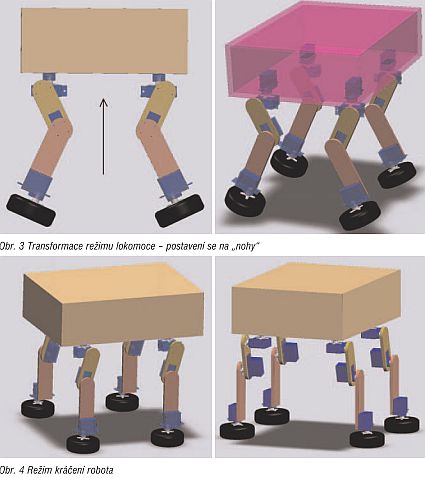
Po analýze nápadu v rané fázi konstrukčního návrhu následovaly různé výpočty, přičemž se začalo geometrickými výpočty karosérie a nohou. Vypočítaly se jednotlivé objemy, z nich hmotnosti s úvahou, že na výrobu dílců bude použit polykarbonát Lexan ISO 178, a z vypočtených hmotností se určily tíhové síly. Z hmotností a objemů jednotlivých dílců byl určen výsledný objem a výsledná hmotnost robota. Na bázi těchto hodnot se přistoupilo k dimenzování pohybového mechanismu robota včetně pohonů. Tyto výpočty byly nezbytné pro určení požadovaných krouticích momentů v jednotlivých kloubech, na bázi kterých byl zvolen servomechanismus HS-55 s krouticím momentem 1,1 kg/cm. Při výpočtu kolového podvozku bylo třeba vypočítat řadu jízdních odporů, tj. valivý odpor, odpor stoupání, zrychlení a odpor při překonávání překážky. Jejich součtem byla stanovena hnací síla, jejímž použitím bylo možné vypočítat rychlost a zrychlení při průjezdu dráhy 1 m a také čas, za který se daná dráha vykoná. Použitím Denavit Hartenbergerovy věty se přistoupilo ke kinematickému rozboru kráčejícího podvozku, přičemž analýza byla provedena na čtvrtině modelu robota kvůli symetrii pohybového mechanismu (nohou). Byly určeny složky polohového vektoru, jejichž derivací lze dospět k rychlosti a zrychlení koncového bodu, tj. kola vzhledem k těžišti [1]. Návrh a analýza mobility robota s podporou CADNásledovala analýza mobility, která byla provedena na počítačovém CAD modelu vytvořeném v programovém prostředí SolidWorks 2009, přičemž se zkoumala lokomoce kolového podvozku (obr. 2), rekonfigurace (obr. 3) a kráčejícího podvozku (obr. 4).
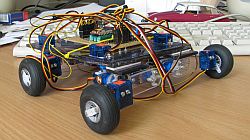
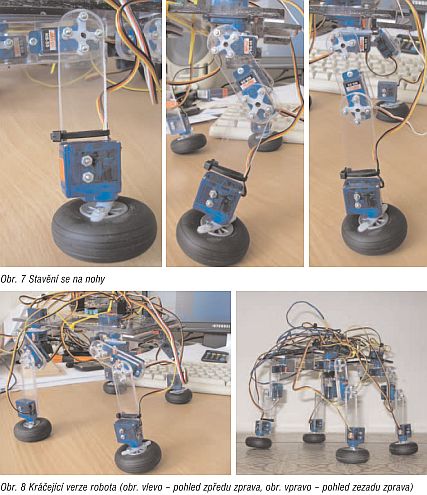
Rekonfigurace modelu se uskutečňuje vysunutím podklopených nohou zpod karosérie, a to takovým způsobem, že bederní a kolenní kloub se natáčejí a tím pádem se karosérie zvedá od země. Kola se také překlápějí z běhounové části na boční disky, které plní funkci chodidel. Když robot stojí na zemi, následuje postupné natočení nohou ve směru pohybu. Chůze byla simulována na bázi biologického vzoru větších savců, u nichž nejprve provede krok pravá (levá) přední noha, za ní následuje pravá (levá) zadní, zatímco se chodidla levých (pravých) nohou dotýkají země a tělo se mírně posouvá vpřed, s ním i levá (pravá) stehna. Když se kroky pravých (levých) nohou provedou, jsou na řadě levé (pravé) nohy. To se děje dokola a „transformer" se plynule pohybuje dopředu s mírným kývavým pohybem těla kvůli udržení těžiště v těžiskové oblasti. Podobnou kinematiku pohybového ústrojí má například slon [1]. Zrození prototypu robotaPo virtuálním návrhu a ověření požadovaných funkcí robota v prostředí CAD systému následovala praktická realizace navrženého robota (obr. 5, 6, 7, 8), přičemž bylo nutno nejprve upravit čtyři servomechanismy kol pro kontinuální rotaci nahrazením potenciometrického snímače polohy napěťovým děličem. Následně byl vytvořen kyčelní kloub pomocí spojení dvou servomechanismů. Z polykarbonátu se vyrobily jednotlivé díly, které se poté smontovaly a vytvořily tak úplnou konstrukci robota. Důležitým krokem bylo zhotovení plošného spoje řídícího modulu, který obsahuje patici pro mikropočítač Basic Atom Pro 28-M a další podpůrné obvody. 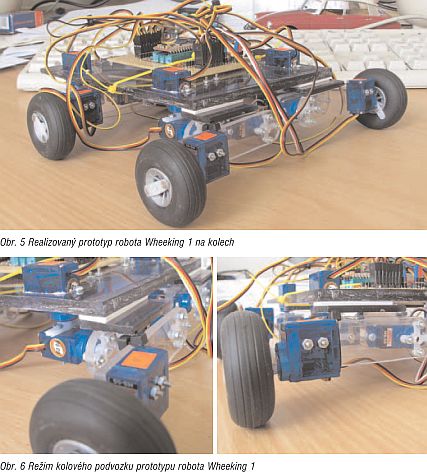 Po zkonstruování mechanických částí robota, instalaci pohonů, zapojení elektroniky a naprogramování mikropočítače se přistoupilo k odzkoušení robota (obr. 5, 8). Je třeba dodat, že se to konalo v interiéru, jak se uvažovalo i ve výpočtech. Režim kolového podvozku je zřejmý z obr. 5. Dále se zčásti řešila rekonfigurace z kolového režimu na režim chůze. Prvním krokem transformace z kolového na kráčející podvozek bylo natočení kyčelního kloubu ve směru pohybu, tj. o 90° z důvodu uvolnění servopohonů kolenního kloubu z parkovací zarážky a jeho současné narovnání. Analogicky byla vyzkoušena i zpětná transformace kráčejícího podvozku na kolový, která se uskutečnila zvednutím nohy, přičemž dolní část nohy byla kolmá na horní, a jejím následným podklopením pod karosérii. Následně se odzkoušelo zapadnutí kolenního kloubu do parkovacích zarážek [1] pro kolový provoz.
|
 Naplnění cíle
Naplnění cíle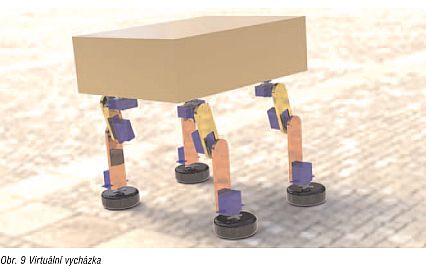
|