| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 09.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 13.07. AutoCAD – kurz pro středně pokročilé
- 13.07. Trimble SketchUp – základní kurz
- 15.07. Autodesk Inventor – základní kurz
- 15.07. AutoCAD Electrical – základní kurz
- 17.07. Autodesk Inventor – kurz iLogic

Aktuality
- Stačí vyfotit dům a AI dopočítá střechu – doktorandi FEL ČVUT vítězí ve světové soutěži
- Jak chytré míče sledují každý dotek
- CAD Schroer se zaměřil na startupy
- Pozvánka na CADfórum 2026
- Gravity Sketch vydává aktualizaci rozhraní
- ENGYS uvedl open-source CFD HELYX ve verzi 4.5.1
- BOOTIQ navrhl maskota pro IT oddělení Škoda Auto
- PTC představuje Orbit

Konstruujeme ve výuce robotickou linku řízenou mikropočítači |
| Autor článku: Petr Fořt | |
| Úterý, 06 Leden 2026 23:30 | |
|
Úkolem pro naše studenty bylo realizovat digitální prototyp robotické linky od návrhu a konstrukce jednotlivých robotů, přes řešení jejich kinematiky až po kompletní programátorskou přípravu řízení celé linky.
Úkol bezesporu nelehký, ale měli jsme již možnost těžit ze zkušeností z loňského roku, kdy se našim studentům podařili pěkné realizace robotických ramen a řízení pomocí mikropočítače Arduino. Některé z projektů byly následně vyrobeny pomocí technologie 3D tisku. Dnešní studenti mají proti naší generaci jedinečnou možnost projít si celý proces produkce zařízení od prvotních konceptů až pro jejich výrobu a odladění. Dostupnost potřebných technologiíZákladem projektu řešeného našimi studenty byla aplikace technologických novinek v oblasti hardware, software a produkčních zařízení, které jsme nasadili do výuky v letošním roce. Od počátku zpracování projektu jsme měli víceméně neomezené možnosti napříč PLM vybavením, které jsme opřeli v letošním roce tradičně o nejnovější produktová řešení. Studenti měli možnost v rámci projektu aplikovat libovolný softwarový nástroj, který je dostupný v rámci celosvětových komunit našich dodavatelů. Variantní řešení v otevřeném prostředí nápadů a clouduPro realizaci projektu jsme dali studentům částečně volnou ruku. Omezili jsme pouze vstupní specifikace pohonu a řízení jednotlivých robotických ramen. Komponenty robotů musely vycházet z finančně dostupných typů servopohonů s digitálním odměřováním dráhy používaných například pro přesné řízení větších modelů vrtulníků a akrobatických letadel. Digitální servopohony mají výbornou přesnost, rychlost a precizní řízení pohybu s ohledem na tažnou i přídržnou sílu. Příliš jsme nezasahovali do koncepce a výrobních postupů v případě konstrukce robota. Technologie výroby musela být pouze optimalizována proti technickému vybavení školy a našemu produkčnímu strojovému parku. Projekt jsme zahájili od prvních náčrtů a skic ve třetím ročníku, kdy již mají studenti jisté zkušenosti s využitím digitálních technologií ve výuce.
Za základ řízení jednotlivých robotických pracovišť v postupové lince byla zvolena sada mikropočítačů. Jeho dostupnost, cena a otevřenost přímo nabádá k prvním krůčkům v oblasti mikroprocesorového řízení. Velmi příjemnou je také celosvětová dosažitelnost tisíců zdrojových kódů v rámci studentské komunity Autodesku. Lze si tak v simulačním softwaru Tinkercad doslova pohrávat s návrhy a řešením jednotlivých pohybových uzlů. Komunitní přístup k problému navíc poskytuje možnost konzultovat případné problémy doslova napříč celým světem. Od náčrtů až ke kompletnímu návrhuStudenti měli navrhnout robotické rameno tak, aby bylo vyrobitelné v prostředí školních dílen. Z tohoto důvodu jsme je napřed seznámili s dostupnými technologiemi a produkčními možnostmi. Zvážení použitých výrobních postupů bylo základem návrhu konceptu řešení robotického ramene. Za naši ukázku jsme zvolili pěknou studii Jiřího Jeřábka, který přistoupil k řešení koncepce robota s podílem jak klasické výroby s využitím ohýbání plechu, tak aplikace 3D návrhů provázaných na výrobu pomocí 3D tisku.
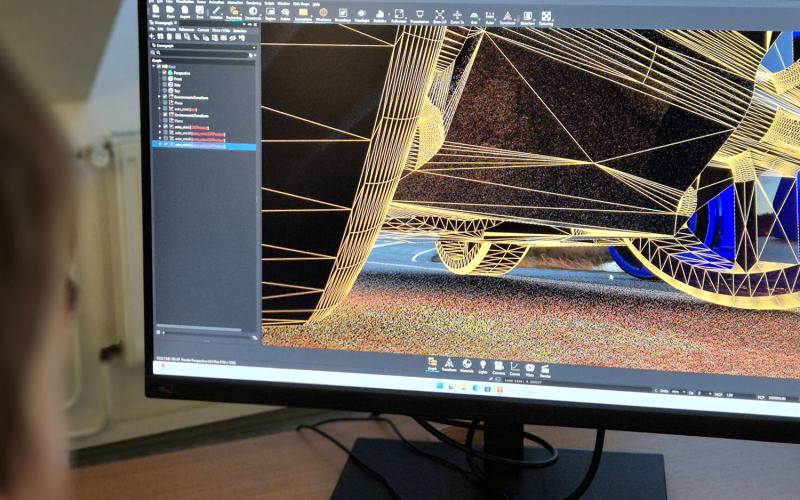
V dalším kroku byly připraveny detailní konstrukční sestavy robotických ramen s využitím 3D modelování a s podílem dodávaného 3D obsahu. Tato fáze projektu byla již přesně laděna s ohledem na pohybové vazby a rozměry servopohonů. Pro dílenskou výrobu součástí byla také připravena výkresová dokumentace. Pro součásti vyráběné pomocí 3D tisku vznikly kontrolní výkresy. Interakce robota s výrobním procesemPo vyřešení všech konstrukčních nuancí a celkovém zpracování technické dokumentace dostali studenti další úkol. Ten byl zadán jako praktické řešení výrobní linky, která realizuje proces výroby sestavy s využitím navrženého robota. Pro zjednodušení situace ve výukovém prostředí jsme ve výrobní lince vypustili ustavovací a polohovací členy, jejichž konstrukční řešení bylo nad rámec časových možností věnovaných tvorbě projektu. Studenti měli detailně popsat výrobní takt linky a jednotlivé operace dříve prováděné ručně nahradit robotickou manipulací. Vznikla pestrá mozaika zajímavých řešení, která byla odladěna v závislosti na konstrukčním návrhu robotů. Rádi bychom tímto poděkovali studentům za jejich příspěvky. Více informací o výukových projektech najdete na www.spszr.cz.
Mohlo by vás zajímat:
|
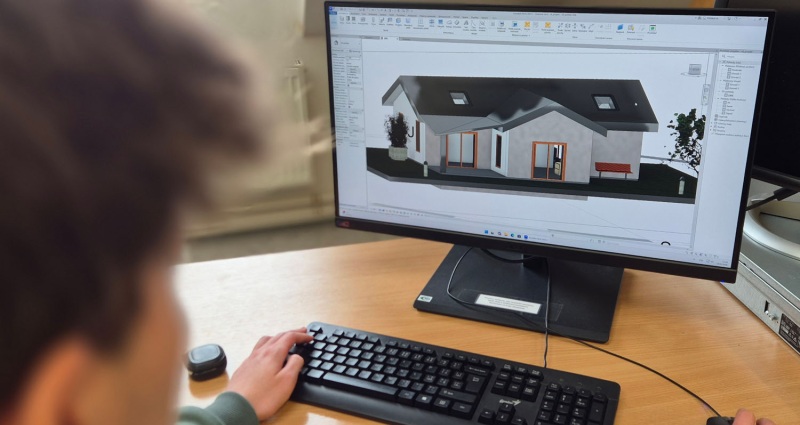
") Spojení technologií a nástrojů pro tvorbu digitálních prototypů s dosažitelností potřebného technického a softwarového vybavení dává ve výuce nové a jedinečné možnosti. Ve výuce jsme zkusili na SPŠ ve Žďáru nad Sázavou zajímavý projekt, kterého cílem bylo posílit znalosti našich studentů v oblasti navrhování pracovišť.
Spojení technologií a nástrojů pro tvorbu digitálních prototypů s dosažitelností potřebného technického a softwarového vybavení dává ve výuce nové a jedinečné možnosti. Ve výuce jsme zkusili na SPŠ ve Žďáru nad Sázavou zajímavý projekt, kterého cílem bylo posílit znalosti našich studentů v oblasti navrhování pracovišť.")
")
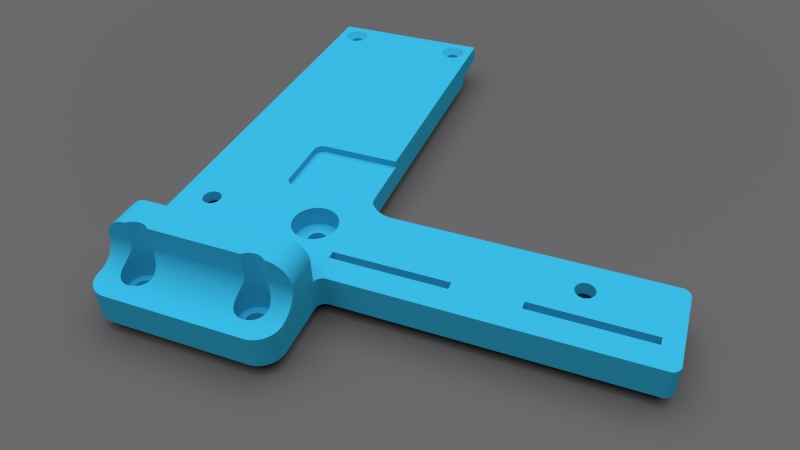
") Finální prezentace konstrukčního návrhu
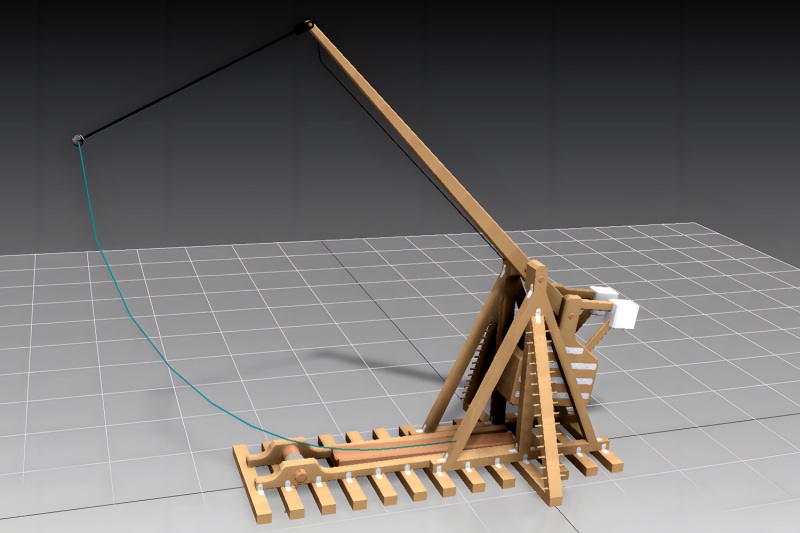
Finální prezentace konstrukčního návrhu") Analýza produkčního taktu linky vytvořená na základě 3D simulace
Analýza produkčního taktu linky vytvořená na základě 3D simulace