| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 26.06. Webinář: Transformace firmy pohledem z venku: Příprava vaší firmy pro úspěšnou d...
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 13.07. AutoCAD – kurz pro středně pokročilé
- 13.07. Trimble SketchUp – základní kurz
- 15.07. Autodesk Inventor – základní kurz

Aktuality
- Keysight rozšiřuje portfolio Photonic Design Automation akvizicí
- Bezpečnost a trvanlivost – proč hliníkové systémy získávají převahu v komerčních i rezidenčních objektech
- IMSI Design uvádí na trh TurboCAD Mac 17
- Make-to-Order Days 2026 s vynikajícím výsledkem
- Siemens, Databricks a FFT proměňují výrobní data v škálovatelné poznatky založené na AI
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli

Model tříosého portálového manipulátoru CAM2009 |
| Čtvrtek, 12 Leden 2012 14:17 | |
 I jednoduché lineární tříosé manipulátory patří mezi sofistikovaná mechatronická zařízení. Charakterizuje je integrace mechaniky, elektroniky a inteligentního počítačového řízení. Velmi dobře se na ně dívá, jak vykonávají své činnosti. Těžší je to už s jejich návrhem od mechanických částí přes pohony až po řídící elektroniku. Každý student oboru Mechatronika by měl mít možnost postavit si a oživit takové zařízení. Tak, jak není nad osobní zkušenost s výchovou dětí, tak to samé platí i o vypiplání a zkrocení si „vlastního" manipulátoru. To, že k vytvoření a virtuálnímu ověření funkčnosti těchto zařízení jsou nutné CAD systémy, je každému čtenáři více než jasné. Bez toho by tento článek nespatřil stránky tohoto časopisu. I jednoduché lineární tříosé manipulátory patří mezi sofistikovaná mechatronická zařízení. Charakterizuje je integrace mechaniky, elektroniky a inteligentního počítačového řízení. Velmi dobře se na ně dívá, jak vykonávají své činnosti. Těžší je to už s jejich návrhem od mechanických částí přes pohony až po řídící elektroniku. Každý student oboru Mechatronika by měl mít možnost postavit si a oživit takové zařízení. Tak, jak není nad osobní zkušenost s výchovou dětí, tak to samé platí i o vypiplání a zkrocení si „vlastního" manipulátoru. To, že k vytvoření a virtuálnímu ověření funkčnosti těchto zařízení jsou nutné CAD systémy, je každému čtenáři více než jasné. Bez toho by tento článek nespatřil stránky tohoto časopisu.
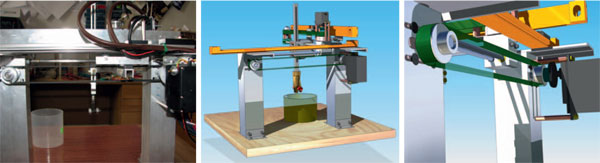
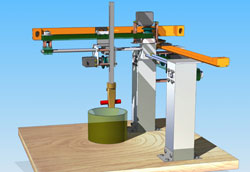
Vývoj manipulačních zařízení a manipulátorů se již od počátku spojoval s nahrazováním člověka ve výrobních a montážních procesech. Jejich nasazování do průmyslové výroby se ve světě datuje od 70. let minulého století a neustále pokračuje jejich vývoj a modernizace díky stále novějším a modernějším technologiím. Charakteristickým znakem přímočarých manipulátorů je, že jejich jednotlivé manipulační osy vykonávají lineární pohyb. Jsou to poměrně přesné roboty. Podle počtu os mohou být jednoosé, dvouosé, resp. tříosé, kde tyto osy jsou obvykle na sebe kolmé. Často jsou označovány jako kartézské nebo portálové roboty. Stavbu lineárních manipulátorů v současnosti realizuje značné množství výrobců lineárních pohybových jednotek, konstrukčně řešených na principu modularity, což umožňuje vytvářet širokou škálu jejich vyhotovení. Přednostně se uplatňují při automatizaci manipulačních činností, přemisťování objektů a montáži a označují se pick & place roboty. Jejich charakteristickým znakem je i to, že se svou konstrukcí poměrně značně liší od běžné představy robota. Řešený manipulátor CAM2009 vznikl v rámci řešení práce [1], přičemž cílem bylo navrhnout a sestrojit manipulátor s translačním pohybem ve třech na sebe kolmých osách, pohybujícího se v kartézských souřadnicích. Tento funkční model byl navržen a realizován s cílem podpořit praktickou část výuky v studijních programech na Strojní fakultě Technické univerzity v Košicích. Drtivá většina těchto typů robotů má koncepci založenou na čtyřech opěrných pilířích. Tyto pilíře však často tvoří překážku při manipulaci s objekty větších rozměrů. Řešení tohoto typu manipulátoru využívá koncepci jen na dvou nosných pilířích (obr. 1) tvořících základní rám celého manipulátoru.
Taková koncepce uspořádání je poměrně odvážným návrhem, protože celková tuhost a stabilita takové koncepce je hraniční. U samotného návrhu byla snaha eliminovat tyto předpokládané nedostatky a slabosti. Akční členy a snímačePro pohon manipulátoru v jednotlivých osách byly vybrány cenově nejdostupnější polohovací servomechanismy využívané v RC modelech, které transformují elektrickou energii na mechanickou práci. Ovládání těchto typů akčních členů je poměrně jednoduché, protože se využívá šířkově-impulsně modulovaný signál. Jde o periodický obdélníkový průběh elektrického napětí v čase, který v šířce impulsu (0,9 - 2,1 ms) o stálé frekvencí v sobě nese informaci o žádané poloze (úhlu natočení) výstupního unášeče servomechanismu. Šířka impulsu tedy určuje polohu výstupního kotouče (páky). Tyto modelářské polohovací servomechanismy jsou určeny pouze pro rotační pohyb v rozsahu maximálně 180°. Pro použití jako pohon ve větším rozsahu je třeba je upravit pro kontinuální rotační pohyb. Pro model manipulátoru CAM2009 byly vybrány polohovací servomechanismy Hitec HS-805BB (pohon pro osu X), Hitec HS-311 (pohon pro osu Y), Futaba S3003 (pohon pro osu Z). Všechny servomechanismy byly upraveny do režimu kontinuální rotace, tj. rozsah rotačního pohybu je neomezený. Jediným řídícím signálem (šířkově-impulsně modulovaným) je tedy možné ovládat směr a rychlost otáčení výstupního kotouče servomechanismu.
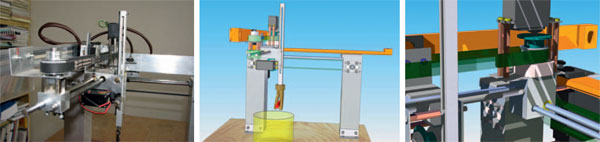
Snímání polohy pohybů manipulátoru je zajištěno pomocí odporového snímače. Tyto typy snímačů byly v minulosti často zavrhovány právě kvůli jejich citlivosti na nečistoty, oxidaci odporové vrstvy běžce a nízké životnosti. Nástupem nových technologií však v posledních letech došlo k jejich renesanci související s aplikací odporových drah na bázi vodivých plastů. Taková odporová dráha se vyznačuje vysokou životností (až 50 milionů cyklů), vysokým rozlišením a dobrou odolností vůči vibracím a nárazům. Řešení uspořádání manipulátoruSamotné realizaci manipulátoru předcházela tvorba modelu v prostředí SolidWorks, ve kterém byla realizována i analýza statických namáhání a možných kinematických kolizí. Rám konstrukce tvořený dvěma pilíři byl umístěn na základovou dřevěnou desku, která je zároveň základnou pro manipulaci s objekty. Konstrukce byla optimalizována z hlediska hmotnosti a byly využity především tenkostěnné profily na bázi materiálů z lehkých hliníkových slitin. Pro zajištění pohybu v ose X bylo navrženo kluzné lineární vedení, které je složené ze dvou kruhových tyčí a běžce s uložením v kluzných ložiscích. Tyče jsou upevněny v podpěrách a zároveň lze jimi zajistit větší tuhost rámu konstrukce. Akční člen servomechanismus HiTec HS-805BB je umístěn na jednom z pilířů pomocí distančních sloupků. Hnací rotační účinek z servomechanismu je dále přenášen přes navrženou přírubu na řemenici a pomocí řemenového převodu se transformuje rotační pohyb na lineární translační pohyb upnutím pohybového členu (unášeče) svěrným spojem o ozubený řemen.
Jedinou nevýhodou použití převodů s ozubenými řemeny je jejich potřeba napínání pro zajištění jejich správného chodu. Tomu musel být přizpůsoben i konstrukční návrh samotného uložení hřídelí řemenic. V jednotlivých podpěrách byly navrženy drážky pro polohování ložiskových domků s cílem napnout řemen požadovaným předpětím. Polohovaný unášeč byl spojen zároveň s běžcem snímače, který bude poskytovat informaci o poloze unášeče ve formě změny elektrického odporu snímače. Pro zajištění pohybu v ose Y byla použita stejná koncepce. Jako pohon byl využit servomechanismus Hitec HS-311 v kombinaci s podobným mechanickým převodem do translační formy pohybu. Stejně i v této ose je pohyb unášeče snímán odporovým snímačem.
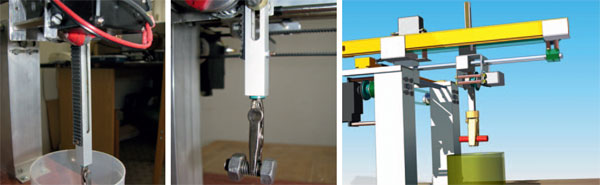
Nejkomplikovanějším uzlem bylo zajištění pohybu v ose Z, tedy pohybu ve svislém směru pro zdvih a uložení předmětu manipulace. Nosník s koncovým uchopovací členem nemohl být uchycen na obou koncích, protože by to bránilo samotné manipulaci s objekty. Pro transformaci rotačního pohybu akčního členu Futaba S3003 v kombinaci s řemenovým převodem. Dalším problémem, který zde bylo třeba řešit, bylo napnutí řemene, které již nebylo možné řešit polohováním řemenic. Ozubený řemen byl proto rozdělen a v rozvinuté formě byl napnut dvěma šroubovými spoji přímo na polohovaném nosníku. Ani se snímáním polohy v ose Z to nebylo tak jednoduché, jak v osách X a Y. Tady už nebylo možné použít stejný odporový snímač, protože by musel být umístěn v horní části manipulátoru, a tím by se zvětšily jeho celkově rozměry na dvojnásobek. Snímání polohy v ose Z proto bylo třeba řešit přímo v servomechanismu, kde byl umístěn optický impulsní snímač otáčení výstupního kotouče servomechanismu. Po jednoduchém matematickém přepočtu je tedy možné získat informaci o posunutí ve směru osy Z.
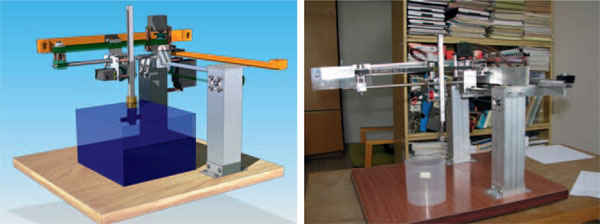
Konstrukce ramene souřadnicového manipulátoru je jednoznačně určující charakteristika robotu. Určuje tvar pracovního (manipulačního) prostoru, souřadnicový systém robota a objem (velikost) pracovního prostoru je dán pohybovými možnostmi jednotlivých částí ramene manipulátoru. Z hlediska využívání je to nejdůležitější prostor, který můžeme obsáhnout chapadlem manipulátora nebo nástrojem, kterým manipuluje.
VyužitíTento model manipulátoru je využíván při praktických cvičeních studenty studijního programu Mechatronika. Umožňuje prakticky si ověřit přímé i inverzní úlohy kinematiky při polohování uchopovacího členu manipulátoru. Zpětnovazební řízení polohy na základě informací ze snímačů polohy je realizováno pomocí vstupně/výstupní komunikační karty v počítači v prostředí Matlab/Simulink, kde je možné současně spustit i simulační model manipulátoru. Každý z nás slyšel známé přísloví, že je lepší jednou vidět než stokrát slyšet. Mechatronici zas mohou říci, že lépe je jednou zkonstruovat a naprogramovat, jak tisíckrát o tom číst. 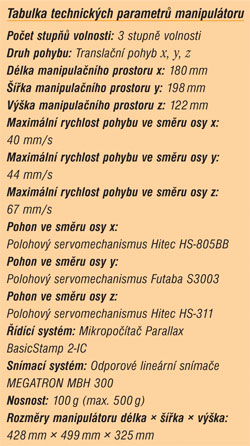 Literatura:[1] Korenek, M.: Návrh funkčného modelu manipulátora, DP 2009, Technická univerzita v Košiciach, Strojnícka fakulta. Košice, 2009. Příspěvek byl vypracován v rámci řešení projektů VEGA 1/0022/10 Příspěvek k výzkumu strategií měření na souřadnicových měřicích strojích.
Mohlo by vás zajímat:
|