| Google překladač: |

|

|


Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- 22.06. AutoCAD – kurz pro středně pokročilé
- 22.06. Autodesk Maya – úvod do 3D
- 23.06. Konference Advanced Engineering TechDay 2026
- 24.06. Autodesk Inventor – základní kurz
- 25.06. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 29.06. Autodesk Maya – pokročilé techniky modelování
- 29.06. Blender – pokročilé materiály a renderování
- 01.07. AutoCAD a AutoCAD LT – základní kurz
- 05.07. AutoCAD 2013 - základní kurz
- 13.07. AutoCAD – kurz pro středně pokročilé

Aktuality
- IMSI Design uvádí na trh TurboCAD Mac 17
- Make-to-Order Days 2026 s vynikajícím výsledkem
- Siemens, Databricks a FFT proměňují výrobní data v škálovatelné poznatky založené na AI
- Digitální strážce kritické infrastruktury od české firmy
- Siemens zpřístupňuje průmyslový software evropským startupům
- Nádherná hra, jakou jste ještě nikdy neviděli
- Mohou simulace a špičkové technologie zajistit obranu Evropy?
- Oficiálně licencovaný simracing volant Ferrari & 24 hodin Le Mans

Model výtahu |
| Středa, 10 Červen 2009 09:25 | |
|
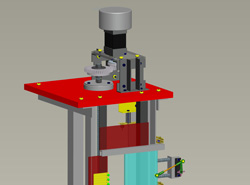
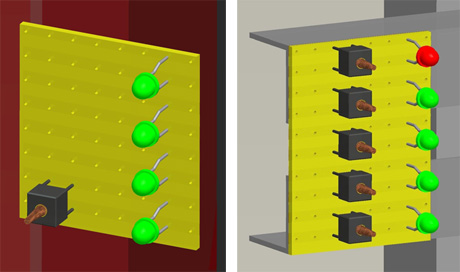
Inspirace a cílČlánek se zabývá konstrukcí funkčního modelu výtahu, který byl vytvořen pro didaktické účely. Tento funkční model byl vyvinut na Strojní fakultě Technické univerzity v Košicích. Některé funkční části byly v porovnání se skutečnými výtahy zjednodušené. Studenti mají možnost prakticky si ověřit své získané poznatky o aplikacích snímačů, akčních a řídicích členech. Mechatronika tak může projít doslova rukama studentů. Trocha historiePrvní výtah, o kterém víme, sestrojil slavný řecký učenec Archimedes asi v roce 236 př. n. l. Kabina visela na kovovém lanu a do výšky ji zvedal ruční vrátek. Výtah měl i římský císař Nero (37–68 n. l.). Jeho výtah měl dokonce bezpečnostní zařízení, a to kožený nafukovací vak, který měl zmírnit následky případného pádu. Výtah v obytném domě použil pravděpodobně v roce 1670 E. Weigel v Jeně, ale pravá éra výtahů začíná až od roku 1853, kdy Američan Elisha Graves Otis zkonstruoval a vystavěl výtah v podstatě dnešní konstrukce. Výtah byl po stranách vedený lištami a měl bezpečnostní zařízení. To tvořily tzv. zachytávače, které v případě přetržení lana zabrzdily kabinu výtahu na vodítku. Funkce didaktického modelu výtahuDidaktický model výtahu obsahuje čtyři podlaží. Čtyři podlaží jsou zvolena kvůli rozměrovému omezení modelu, který je určen jako didaktická pomůcka pro využití v laboratorních podmínkách na fakultě. Na každém podlaží mohou čekat „Aktivní cestující“, kteří budou inicializovat přivolávání výtahu. Z hlediska řízení je model výtahu vybaven funkcí snímání přítomnosti osob v kabině. Tato funkce má zajistit splnění požadavku vyšší priority zadávání příkazů z kabiny a má přispět k zamezení zadávání matoucí příkazů, které s oblibou zadávají někteří neukáznění uživatelé. Jelikož někteří uživatelé výtahů velmi rádi zkoušejí rozměrovou a hmotnostní kapacitu výtahových kabin, má význam také zavedení funkce snímání přetížení kabiny výtahu. Konstrukce modelu umožňuje realizovat i plynulý rozběh a dojezd výtahové kabiny, což je z hlediska uživatele také důležitá funkce. Pro účely ovládání pohybu kabiny modelu je zajištěna funkce detekce polohy kabiny. Snímání polohy bylo navrženo tak, aby bylo možné bezpečně určit polohu kabiny i v případě výpadku napájecího napětí. Přivolávání výtahu na podlažích – při přivolávání kabiny výtahu bude k dispozici možnost volby směru, kterým chceme cestovat. Takto bude ošetřeno druhé a třetí podlaží. Na prvním a posledním podlaží bude samozřejmě jen jedna možnost. Konstrukční řešení didaktického modelu výtahuPro zajištění pohybu kabiny byl vybrán stejnosměrný motor s cizím buzením, přičemž přenos točivého momentu byl zajištěn pomocí převodu ozubenými koly na závitovou tyč. Kabina je spojena s pohybovou maticí, a tedy otáčením pohybového šroubu dochází k pohybu výtahové kabiny. Samotná kabina se pohybuje ve vedení. Jde o nestandardní řešení oproti skutečným výtahům, kde se využívají střídavé pohony v kombinaci s lanovými převody. Toto řešení však bylo zvoleno hlavně z důvodu jednoduchosti realizace [2, 3]. ZávěrFinální konstrukční řešení didaktického modelu výtahu je uvedeno na obr. 3. Toto řešení je koncipováno tak, aby umožňovalo vysokou míru variability, tj. aby bylo možno sestavit různé zapojení a aby bylo možno jednotlivé moduly používat i zvlášť při výuce vybraných problémů. Studenti si tedy v první fázi musí pomocí drátových propojek nejprve sestavit hardwarové řešení výtahu a v další fázi vypracují algoritmus provádění jednotlivých funkcí a vhodný software. Některé moduly byly obohaceny o ochranné prvky, které mají zabránit jejich poškození při nesprávné manipulaci s nimi. Zároveň byly doplněny i ochranné kryty a další prvky, aby nedošlo k poranění nebo kolizi s jinými předměty. Literatura[1] Historie výtahů [on-line] 2006, [citace z 20. prosince 2006], dostupné na internetu: <vytahy.sk/Vynalez.html – 8k>.
Mohlo by vás zajímat:
|