| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 22.07. Webinář Simulace proudění s volnou hladinou
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé
- 27.07. Autodesk Fusion 360 – základní kurz
- 29.07. AutoCAD – kurz pro středně pokročilé
- 31.07. Trimble SketchUp – prezentace návrhů
- 03.08. AutoCAD – kurz pro pokročilé
- 04.08. AutoCAD kurz – navrhování a správa dynamických bloků
- 05.08. AutoCAD a AutoCAD LT – základní kurz

Aktuální články
- Pozvánka na 3. ročník WORLD OF MACHINING
- Esri vydává ArcGIS Velocity pro vlastní hostování
- Dotace na odborné školení zaměstnanců
- Realizujeme projekty na škole s využitím 3D tisku, 14. díl
- AMB 2026: Kolaborativní procesy jako hnací síla automatizace
- Seznamte se s BCN3D Omega I60 G2
- FARO CREAFORM rozšiřuje portfolio zařízení HandySCAN 3D
- Dell Pro 3 14 a 16: Firemní notebooky s procesory Intel a AMD

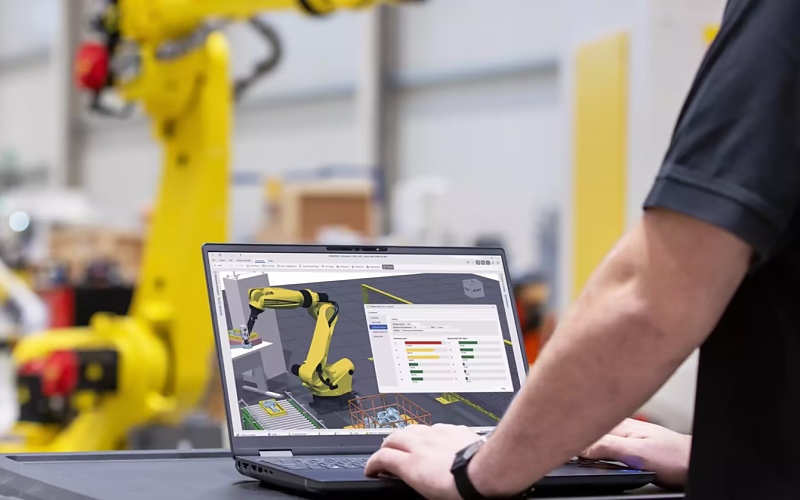
Nové verze SprutCAM 8.2 a modulu Robots |
| Úterý, 01 Říjen 2013 14:30 | |
|
Knihovny Pracovní možnosti Pozice robota Simulace obrábění
Postprocessing Další osy
Mohlo by vás zajímat:
|
 SprutCAM uvolnil novou verzi programu, která zvyšuje funkčnost ovládání robotů. SprutCAM 8.2 díky kinematickým schématům umožňuje vytvářet a ladit kontrolní programy bez použití samotného robota. Verze Robots slouží k rychlému výpočtu složitých 3D pohybů robota včetně jeho koncových efektorů. SprutCAM tak umožňuje programovat roboty značky Stäubli, Fanuc, Kuka, ABB a další. 3D dráhy robota při obrábění modelu mohou být generovány s využitím všech strategií obrábění s ohledem na specifickou kinematiku robota. Strategie obrábění u robotů jsou používané stejným způsobem, jako u klasických CNC strojů. Nastavení os robota při průjezdech lze ve SprutCAM verze Robots korigovat.
SprutCAM uvolnil novou verzi programu, která zvyšuje funkčnost ovládání robotů. SprutCAM 8.2 díky kinematickým schématům umožňuje vytvářet a ladit kontrolní programy bez použití samotného robota. Verze Robots slouží k rychlému výpočtu složitých 3D pohybů robota včetně jeho koncových efektorů. SprutCAM tak umožňuje programovat roboty značky Stäubli, Fanuc, Kuka, ABB a další. 3D dráhy robota při obrábění modelu mohou být generovány s využitím všech strategií obrábění s ohledem na specifickou kinematiku robota. Strategie obrábění u robotů jsou používané stejným způsobem, jako u klasických CNC strojů. Nastavení os robota při průjezdech lze ve SprutCAM verze Robots korigovat.