
| Google překladač: |

|

|
Partneři Projektu CAD





| Po | Út | St | Čt | Pá | So | Ne |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
- 20.07. Blender – úvod do 3D
- 20.07. Blender – úvod do 3D
- 21.07. AutoCAD a AutoCAD LT – základní kurz
- 22.07. Webinář Simulace proudění s volnou hladinou
- 23.07. workshop Strukturální mechanika v programu COMSOL Multiphysics
- 24.07. Autodesk Inventor – návrh trubek a potrubí
- 27.07. AutoCAD – kurz pro pokročilé
- 27.07. Autodesk Fusion 360 – základní kurz
- 29.07. AutoCAD – kurz pro středně pokročilé
- 31.07. Trimble SketchUp – prezentace návrhů

Aktuality
- Capvidia 2026 R1 s aktualizací pracovních postupů pro Creo a NX
- Spolupráce Siemens a HighByte rozšíří využití průmyslové AI
- Průkopníci technologických inovací se setkají v Darmstadtu
- Když konstrukční kapacita nestačí: jak zrychlit projekty bez ztráty kontroly nad daty a kvalitou
- ABB dokončilo akvizici firmy Specialtrasfo
- CoreTech představuje DesignSim pro ověřování DFM v Siemens NX
- OptiTrack vybavuje robotické laboratoře CMU snímáním pohybu
- CoLab 4.0 přináší AI nástroje pro technické revize

Využívání programu Tecnomatix Plant Simulations pro oblast dopravy v městských aglomeracích |
| Autor článku: Hana Neradilová – Gabriel Fedorko – Martin Vasiľ | |
| Čtvrtek, 05 Listopad 2015 00:00 | |
|
 Obr. 1 Pohled na křižovatku s různými druhy dopravních systémů [1] Pro správné fungování dopravních procesů je třeba jejich podrobný výzkum a analýza. Jejich určitou nevýhodou je to, že většina dopravních problémů je originální a je úzce spjata s dopravními charakteristikami a podmínkami konkrétní oblasti. Pro co nejpřesnější pochopení zákonitostí a kauzálních vztahů je kromě klasických experimentálních metod vhodné v maximální možné míře využívat i simulační modely. Jejich pomocí je možné získat velmi detailní informace, které je v reálných podmínkách možné získat pouze velmi těžko, resp. vůbec. Z uvedeného vyplývají široké možnosti významu a použití metody počítačové simulace v oblasti dopravy. Jelikož otázky dopravy tvoří důležitou součást v rámci výzkumu problematiky City logistiky, vyvstává otázka, zda je možné pro tuto problematiku použít simulační nástroje určené prioritně pro oblast logistiky. Jedním z takových softwarů je program Tecnomatix Plant Simulation. Charakteristika programu Technomatix Plant SimulationTecnomatix Plant Simulation je simulační program, který je součástí softwarového balíku Tecnomatix. Tecnomatix tvoří portfolio programových nástrojů, které nabízenými možnostmi řešení zastřešuje komplexně oblast digitální simulace. V rámci řešení inženýrských problémů jej lze aplikovat v rámci všech fází od návrhu a plánování, přes simulaci a ověřování, až po samotnou realizaci a řízení. Systém Plant Simulation je tedy softwarový nástroj určený pro simulaci diskrétních událostí, pomáhá vytvářet komplexní digitální modely různých typů systémů, např. logistických, a umožňuje zkoumat jejich jednotlivé charakteristiky, optimalizovat a vyhodnocovat. Tyto digitální modely umožňují realizovat v dostupném čase rozsáhlé pokusy a scénáře „co kdyby“, a to bez narušení stávajících reálných systémů. Jeho pomocí se také dají získat plánované a očekávané výsledky dlouho před instalací skutečných výrobních systémů. Je zde možnost optimalizovat jednotlivé toky, využívat zdroje a logistiku pro všechny úrovně plánování. Pro tvorbu jednotlivých simulačních modelů nabízí program širokou paletu bloků, které pokrývají základní činnosti a operace. Při snaze o co nejkomplexnější přiblížení se simulačního modelu realitě umožňuje využití programovacího jazyka SimTalk a doprogramování jednotlivých bloků dle požadavků uživatele. Návrh simulačního modelu v programu Technomatix Plant SimulationJako výchozí bod při vývoji simulačního modelu světelné křižovatky byl zvolen jednoduchý typ průsečné křižovatky. V rámci pravidel fungování křižovatky jsme předpokládali, že světelnou signalizací bude řízen pohyb vozidel ve všech směrech. V této fázi jsme kvůli zjednodušení neuvažovali s kategorizací vozidel, to znamená, že jsme uvažovali pouze o jednom typu vozidla – osobním automobilu. Rovněž jsme v této prvotní vývojové etapě nemodelovali pohyb chodců. Pro vytvoření simulačního modelu byly použity dvě základní skupiny bloků. První skupinu tvořily bloky, které byly použity k vytvoření logické funkčnosti simulačního modelu. Šlo konkrétně o bloky TableFile, Method, Source, Drain Track a Event Controller. Prostřednictvím těchto bloků byl namodelován tok vozidel křižovatkou. Jednotlivá vozidla a jejich počty jsou generovány náhodně, pomocí bloku Source. Následně jsou vozidla přiváděna na silniční komunikaci, která je reprezentována bloky Track. Bloky TableFile slouží k definování počtu generovaných vozidel v jednotlivých směrech. Prostřednictvím bloku Method byly definovány předpisy silničního provozu určené pro průjezd světelné křižovatky. Zároveň pomocí těchto bloků bylo modelováno řízení světelné křižovatky. Blok Drain nám v simulačním modelu zajišťuje průběžné odvádění jednotlivých vozidel, která již světelnou křižovatkou projela. Druhou skupinu bloků reprezentují v simulačním modelu bloky Chart a SankeyDiagram. Oba tyto bloky zajišťují v rámci simulačního modelu prezentaci výsledků simulačních experimentů. Pohled na základní strukturu simulačního modelu je na obr. 2. Obr. 2 Pohled na základní strukturu simulačního modelu 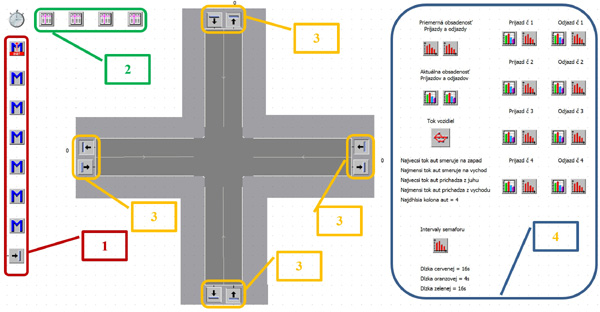 Obr. 2 Pohled na základní strukturu simulačního modelu Z obr. 1 je možné pozorovat, že prezentovaný dopravní model obsahuje čtyři klíčové oblasti, které jsou na obr. 2 označené číslicemi a jednotlivými barvami. Oblast označená číslicí 1 je oblast, která pomocí bloků Method a v rámci nich implementovaných algoritmů definovaných v simulačním jazyce SimTalk řídí komplexní proces světelné signalizace na světelné křižovatce. Oblast číslo 2 slouží pro definování kritérií pro generování počtu vozidel, která průběžně do křižovatky přijíždějí z jednotlivých směrů. Jde o bloky s jednoduchým uživatelským rozhraním. Do třetí skupiny v simulačním modelu patří čtyři dvojice bloků Source a Drain. Jejich úkolem je přivádět jednotlivá vozidla do simulačního modelu (blok Source) a po projetí křižovatky je z modelu průběžně odstraňovat (blok Drain). Pro správné fungování generování počtů jednotlivých vozidel jsou ještě díky propojení vytvořeny jednotlivé párové dvojice bloků Table a Source tak, aby podle údajů definovaných v bloku Table byly v příslušném bloku Source generovány počty vozidel. Poslední čtvrtou oblastí je seskupení prezentačních bloků, které slouží k zobrazení průběžných a konečných výsledků jednotlivých simulačních experimentů. Jednotlivé klíčové oblasti jsou v simulačním modelu kvůli jeho přehlednosti systematicky uspořádány tak, aby poskytovaly dobrou funkčnost pro jeho ovládání a používání. K přehlednosti znázornění průběhu simulace pomáhá významně i aplikace 2D animace celého procesu pohybu jednotlivých vozidel a znázorňování jednotlivých signálů světelné signalizace tak, jak je to prezentováno na obr. 3. 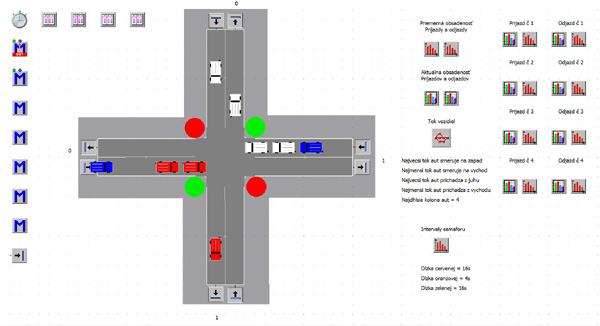 Obr. 3 Ukázka 2D vizualizace průběhu simulačního experimentu Využití simulačního modelu a prezentace výsledků simulačních experimentůVolba způsobu prezentace výsledků simulačních experimentů představuje důležité rozhodnutí z hlediska pochopení získaných informací a prezentace poznatků. Simulační model je navržen se záměrem poskytovat informace o počtech a pohybu vozidel, která projíždějí jednotlivými směry křižovatkou. Pro znázornění intenzity vozidel v jednotlivých dopravních směrech je použit blok s označením Sankey. Už z názvu vyplývá, že je to blok, který prezentuje informace o toku vozidel ve formě Sankeyova diagramu. Další informace ohledně pohybů vozidel jsou prezentovány formou 21 grafů. Uvedené grafy poskytují informace o vytíženosti jednotlivých tras a směrů, informují o jejich průběžném vytížení. Všechny tyto informace je možné využít při řešení různých dopravních úloh z oblasti City Logistiky. Velmi perspektivní je využití simulačního modelu v oblasti výzkumu a řešení krizových situací. Model je dostatečně senzitivní a variabilní. Umožňuje ověřovat různé modelové situace. Jeho pomocí je možné zkoumat podmínky vzniku dopravních kongescí, délky kolon. Výsledkovou část modelu lze dále rozšířit a upravit podle konkrétní situace a požadavku jednotlivých řešitelů. 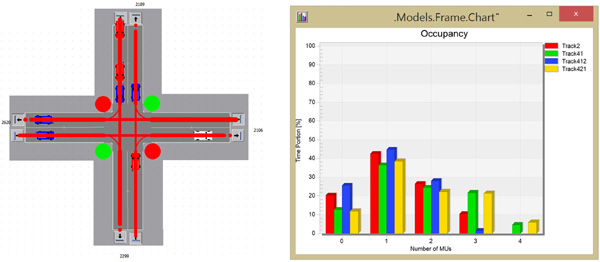 Obr. 4 Prezentace průběžných výsledků simulačního experimentu Model složitého dopravního uzluPo ověření, že Tecnomatix Plant Simulation je možné využít při řešení dopravních úloh a problémů, bylo další ověřování zaměřeno na grafické možnosti simulačního programu v souvislosti s modelováním dopravy a dopravních problémů. Pomocí jeho standardních nástrojů a pomocí simulačního jazyka SimTalk byla vytvořena vizualizace složitého dopravního uzlu, který v sobě spojuje několik systémů dopravy, řízených světelnou signalizací. Výsledná grafická podoba modelu vznikla použitím standardních bloků programu Tecnomatix Plant Simulation, úpravou jejich původní grafické vizualizace a jejich následným postupným překrýváním v jednotlivých vrstvách. Výsledkem je grafická podoba, která je prezentována na obr. 5. 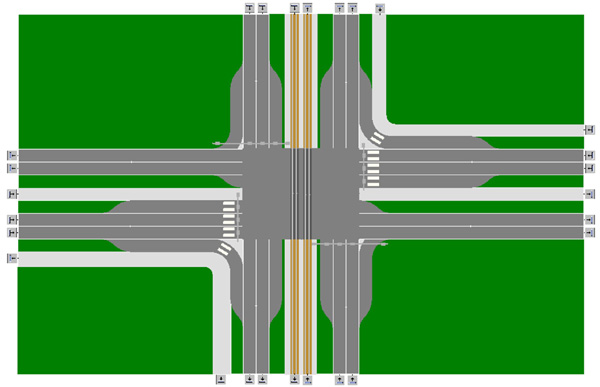 Obr. 5 Grafická podoba simulačního modelu složitého dopravního uzlu Jak se dá vypozorovat, tak grafické zpracování modelu je výstižné a zobrazuje vše podstatné. Pro zvýšení jeho prezentačních schopností byla v modelu upravena i animačním stránka. Díky této úpravě tak při vizualizaci simulačních experimentů bylo možné sledovat pohyb osobních vozidel, chodců, kolejových vozidel. Zároveň je v modelu vizualizován provoz a řízení dopravy světelnou signalizací (obr. 6). 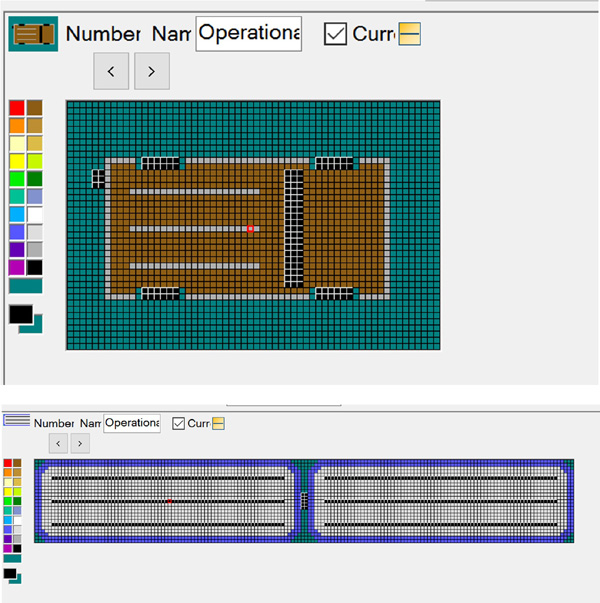 Obr. 6 Grafická úprava jednotlivých dopravních systémů Všechny uvedené úpravy byly realizovány přes volbu Edit Icons a pomocí implementovaného grafického editovacího nástroje. Výsledkem této úpravy tak je grafická verze modelu, která vytváří efektivní a dostatečně názorně vypovídající 2D animaci. Z její prezentace na obr. 7, 8 je možné pozorovat výslednou vizualizaci dopravního procesu. Můžeme tam pozorovat jednotlivá vozidla, která jsou barevně odlišena, jsou tam prezentováni chodci, kolejová doprava a světelná signalizace. Pohyb vozidel a chodců je řízen pomocí programových sekvencí v jazyce SimTalk. 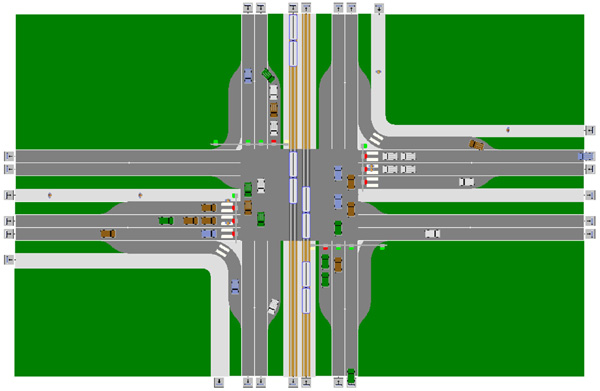 Obr. 7 Pohled na 2D animaci simulačního modelu složité křižovatky 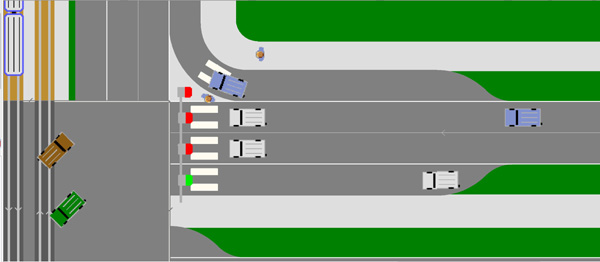 Obr. 8 Detailní pohled na jednotlivé entity v rámci simulačního modelu Kromě komplexních modelů dopravních uzlů lze pomocí programu Tecnomatix Plant Simulation modelovat i různé dopravní prvky a zařízení, jako např. Semafor. Jednoduchý model světelného signalizačního zařízeníSvětelné signalizační zařízení tvoří v rámci dopravních systémů důležitý řídicí prvek. Z tohoto důvodu je nelze vynechat ani při tvorbě simulačních modelů. Program Tecnomatix Plant Simulation neobsahuje žádné základní objekty, které by bylo možné přímo použít na reprezentaci světelných signalizačních zařízení. Proto ani semafor není základním objektem programu, avšak dá se díky kombinaci ostatních objektů v programu dokonale namodelovat a naprogramovat v programovacím jazyce SimTalk, který je základním jazykem zmíněného programu. Zároveň je možné upravit do požadované podoby jeho finální vizuální podobu (obr. 9). 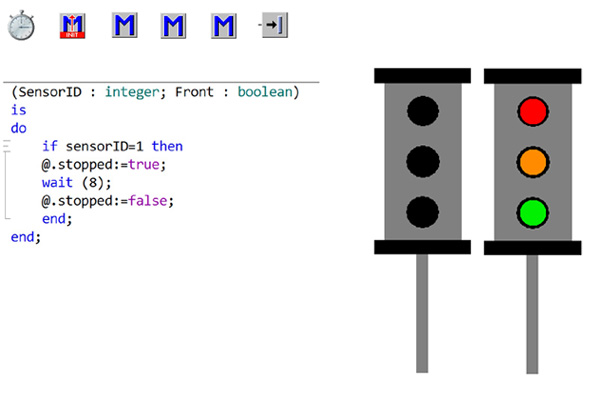 Obr. 9 Struktura modelu světelného semaforu a jeho výsledná vizualizace ZávěrPočítačová simulace je pro řešení problematiky světelných křižovatek v současnosti jedním z klíčových analytických nástrojů. Její největší devízou je, že umožňuje efektivním způsobem řešit různé kategorie dopravních problémů. Pro její realizaci není nezbytnou podmínkou vlastnictví specializovaných simulačních nástrojů. Naopak široké spektrum úloh lze řešit běžně dostupnými simulačními nástroji, mezi které se řadí i program Plant Simulation. Z prezentovaných výsledků lze konstatovat, že program Plant Simulation může být v rámci řešení logistických problémů implementován i do oblasti City logistiky, kde může poskytovat stejně cenné informace jako rozsáhlé speciální programové nástroje primárně určené pro oblast dopravy. Naopak díky možnosti aplikace programovacího jazyka SimTalk lze jednotlivé modely upravit tak, aby se přiblížily co nejvíce reálným provozním podmínkám. Na základě získaných zkušeností můžeme dále konstatovat, že pomocí uvedeného programu a prostřednictvím ověřeného postupu je možné vytvořit simulační model libovolného typu křižovatky a simulační program se také dá použít i na řešení problematiky silniční dopravy. Článek je součástí řešení problémů VEGA 1/0922/12, VEGA 1/0258/14, KEGA 006STU-4/2015 a APVV SK-CZ-2013-0169. Literatura1. http://img.ihned.cz/attachment.php/560/36423560/iosuv5EF7IJOjl6PQWbcdeghxyzSw9An/0125_MG_6218.jpg.
Mohlo by vás zajímat:
|
 Silniční doprava hraje v současné době výraznou roli v rámci efektivního fungování městských aglomerací. Její vliv se projevuje především v kvalitě života obyvatel na daném území, úrovni jeho hospodářského rozvoje, atraktivnosti, rozsahu poskytovaných služeb a ve stavu životního prostředí. Pro řešení dopravních úloh a problémů existuje v současnosti spektrum různých softwarových nástrojů. Jejich pomocí lze vytvářet široké portfolio simulačních modelů a následně i simulačních experimentů. Ve většině případů jde především o řešení úkolů spojených s vedením dopravy přes různé typy dopravních uzlů a sledování s tím souvisejících problémů. Nedílnou součástí provozování silniční dopravy je existence možnosti vzniku různých problémových situací, které může její fungování výrazně ovlivnit a jejichž sekundární účinky se mohou projevit v dalších oblastech.
Silniční doprava hraje v současné době výraznou roli v rámci efektivního fungování městských aglomerací. Její vliv se projevuje především v kvalitě života obyvatel na daném území, úrovni jeho hospodářského rozvoje, atraktivnosti, rozsahu poskytovaných služeb a ve stavu životního prostředí. Pro řešení dopravních úloh a problémů existuje v současnosti spektrum různých softwarových nástrojů. Jejich pomocí lze vytvářet široké portfolio simulačních modelů a následně i simulačních experimentů. Ve většině případů jde především o řešení úkolů spojených s vedením dopravy přes různé typy dopravních uzlů a sledování s tím souvisejících problémů. Nedílnou součástí provozování silniční dopravy je existence možnosti vzniku různých problémových situací, které může její fungování výrazně ovlivnit a jejichž sekundární účinky se mohou projevit v dalších oblastech.





{kind=link}
