|
Úterý, 01 Září 2020 09:17 |
|
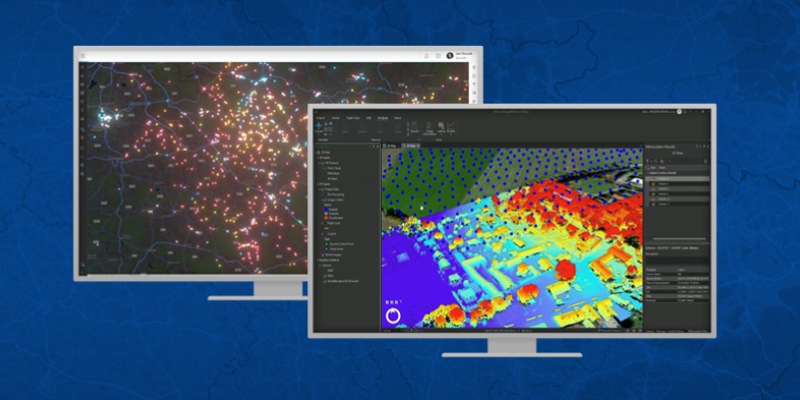
Tags: BIM | Elysium | InfiPoints | MMS | Mračna bodů | Skenování | UAV  a automaticky extrahovaná plochy pomocí InfiPoints (vpravo). (Datový zdroj mračna bodů: Association for Promotion of Infrastructure Geospatial Information Distribution/Shizuoka Prefecture)") Elysium vyvinulo vylepšenou funkčnost automatické extrakce potrubí a rovinných povrchů pro modelování stavebních informací (BIM) ze skenerů používaných UAV (bezposádkovými letadly, drony) a mobilními mapovacími systémy (MMS – Mobile Mapping Systems), navíc k aktuálně podporované extrakci ze stativových skenerů. Nová funkce bude zabudována do nejnovější verze softwaru Elysium InfiPoints pro využívání cloudových bodů, vydaného 31. srpna 2020. Širokoúhlé oblasti lze pokrýt hybridní kombinací různých skenerů. Elysium vyvinulo vylepšenou funkčnost automatické extrakce potrubí a rovinných povrchů pro modelování stavebních informací (BIM) ze skenerů používaných UAV (bezposádkovými letadly, drony) a mobilními mapovacími systémy (MMS – Mobile Mapping Systems), navíc k aktuálně podporované extrakci ze stativových skenerů. Nová funkce bude zabudována do nejnovější verze softwaru Elysium InfiPoints pro využívání cloudových bodů, vydaného 31. srpna 2020. Širokoúhlé oblasti lze pokrýt hybridní kombinací různých skenerů.
Nicméně používání mobilních zařízení během skenování může omezit informace, jako jsou vztahy mezi zdrojovými daty mračen bodů a body potřebnými pro kompletní zachycení dat. To může vyústit v časově náročné úsilí o správnou konfiguraci dat, včetně registrace a modelování dat z jednotlivých mobilních skenerů. Podobné problémy lze pozorovat při pořizování dat z UAV nebo fotografií.
Elysium vyvinulo technologii doplňující veškeré chybějící informace v datech mračen bodů zdokonalenými schopnostmi zpracování v InfiPoints, jako je funkce extrakce potrubí a rovinných ploch a automatický záznam. Tato funkce umožňuje uživatelům přesně spojovat a provádět záznamy mezi mračny bodů naskenovanými UAV/MMS a daty mračen bodů zachycenými ze stativových 3D laserových skenerů. Výsledkem je, že se rozsah efektivního modelování pomocí InfiPoints od minulých standardů významně rozšířil.
InfiPoints má schopnost ze skenovaných dat mračen bodů generovat CAD modely a dodávat je do BIM softwaru. Software původně exportoval CAD data jako jednobarevné prostorové modely. Elysium nyní vyvinulo novou schopnost generovat CAD model, který obsahuje texturu s barevnou informací z dat mračna bodů.
Více informací v originální tiskové zprávě na www.elysium-global.com. |