|
Pondělí, 18 Květen 2020 11:18 |
|
Tags: ABB | Automatizace | obotStudio | Programování | Robotika | Roboty | SCARA | Simulace ") ABB zjednodušilo používání svých oblíbených robotů SCARA a uživatelům nově nabízí možnost uvádět tyto roboty do provozu a ovládat je z laptopu nebo stolního počítače pomocí softwaru RobotStudio určeného pro simulaci a off-line programování. Nový doplněk softwaru RobotStudio nazvaný Robot Control Mate umožňuje uživatelům ruční přestavení robota, programování metodou učení a kalibraci ze svého počítače. Ovládat pohyby robotů SCARA tak nikdy nebylo snadnější a jednodušší. Poprvé v historii tak lze program ABB pro off-line programování používat k ovládání skutečných pohybů robota v reálném čase. ABB zjednodušilo používání svých oblíbených robotů SCARA a uživatelům nově nabízí možnost uvádět tyto roboty do provozu a ovládat je z laptopu nebo stolního počítače pomocí softwaru RobotStudio určeného pro simulaci a off-line programování. Nový doplněk softwaru RobotStudio nazvaný Robot Control Mate umožňuje uživatelům ruční přestavení robota, programování metodou učení a kalibraci ze svého počítače. Ovládat pohyby robotů SCARA tak nikdy nebylo snadnější a jednodušší. Poprvé v historii tak lze program ABB pro off-line programování používat k ovládání skutečných pohybů robota v reálném čase.
Doplněk Robot Control Mate navíc umožňuje programování robota i bez ovládacího panelu FlexPendant.
Robot Control Mate bude nejprve dostupný pro robot IRB 910INV určený k montáži na strop, v budoucnosti bude pak i pro další roboty z portfolia ABB.
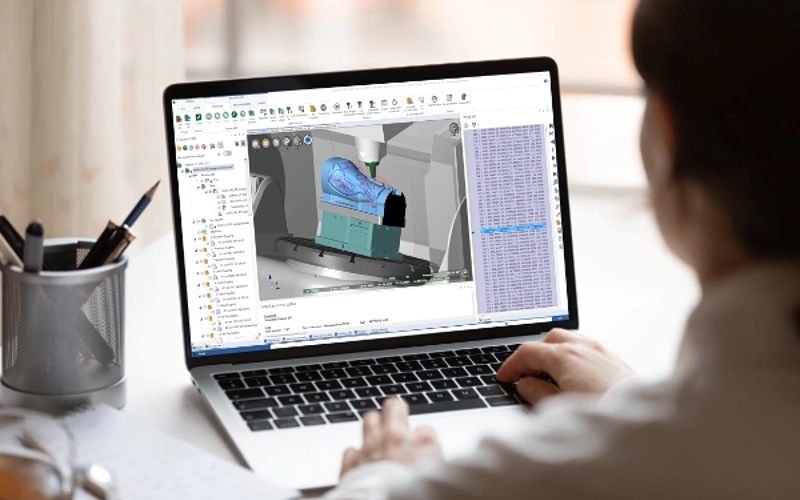
Software ABB RobotStudio je jedno z nejlepších softwarových řešení svého druhu dostupných na trhu. Umožňuje roboty snadno a jednoduše naprogramovat, konfigurovat a virtuálně uvést do provozu na počítači ještě před vlastní instalací. Nabízí uživatelům dokonalou digitální kopii robotů nebo systémů instalovaných v jejich výrobní lince. Díky možnosti programovat off-line mají uživatelé možnost vytvářet, simulovat a testovat kompletní robotickou instalací ve virtuálním 3D prostředí, bez nutnosti narušení chodu reálné výrobní linky. Nové výrobní linky tak lze instalovat rychleji a spustit je okamžitě na plný výkon, bez nepříjemných překvapení během uvádění do provozu. V dnešní době, kdy zákazníci požadují kratší výrobní cykly a přizpůsobování výroby individuálním potřebám, je tato kompetence pro výrobce zcela klíčová.
Zjednodušení instalace, programování a provozu robotů přináší zákazníkům řadu výhod, kromě jiného řeší nedostupnost pracovníků s potřebnou kvalifikací na trhu a otvírá možnosti robotizace i malým a středním podnikům. |